#Bipedal

Text

Dino Moc
Can I keep it?
Source
Creator: FeroxJ
#lego#bionicle#animal#animal shape#rahi#land#land rahi#reptile#reptilian#saurian#dinosaur#eyes#orange#orange eyes#bipedal#claws#tail#long#long tail#raptor#velociraptor#blade#blade tail
59 notes
·
View notes

Text


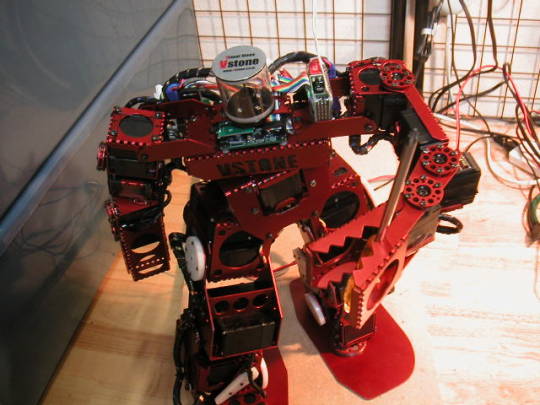
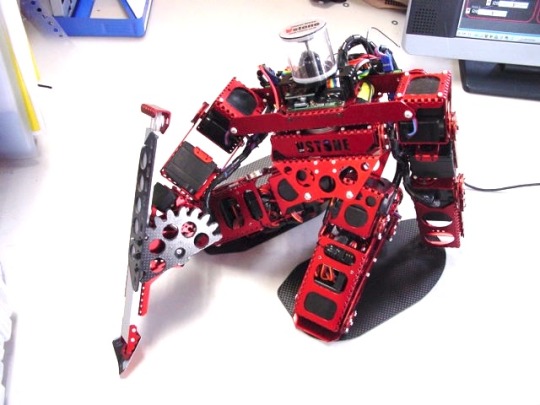
OmniCovered (2004) by Takeshi Maeda, Vstone, Osaka. OmniCovered is a bipedal humanoid competition robot developed for ROBO-ONE 6. Instead of aluminium sheet metal, it has a fibreglass reinforced plastic (FRP) frame, with a white exterior made of laminated ABS resin. It uses new Hitec HSR-5995TG ultra-torque robot servos, and the image processing required the faster Renesas 40MHz 32-bit SH-2 CPU. Its chest bears the autograph of Aerosmith's Steven Tyler, who was impressed when he saw another of Takeshi Maeda's robots in Tokyu Hands (東急ハンズ, Tōkyū Hanzu), a chain of Japanese hobby stores.
"Saturday, qualifying round. Dual sword fighting, image processing balloon popping, and 15cm climbing were all successful, but I ended up in 2nd place. I lost to A-Do again… If I think about it, I was also arrogant, thinking that if all the demonstrations were successful, along with the monocoque exterior, I would be able to qualify for first place. … Sunday, main game. He was suddenly hit by the robot equipped with the Dynamixel servos (ROBOTIS) that I was afraid of, and was defeated in the first round." – Takeshi Maeda, Robotan Production Diary.
At ROBO-ONE 6, OmniCovered came 2nd in the qualifying rounds, but lost in the first game of the finals.
21 notes
·
View notes
Text

Cabarzia trostheidei here lived during the early Permian in what is now Germany, about 295 million years ago.
Despite its very lizard-like appearance it was actually part of the varanopid lineage, a group of scaly amniotes traditionally classified as early synapsids (distant relatives of modern mammals), but which more recently have been proposed to instead be sauropsid reptiles closer related to early diapsids.
It was around 50cm long (1'8"), and its short arms, long legs, slender body, and long tail suggest it was capable of shifting into a bipedal posture when running at high speeds, similarly to some modern lizards – probably mainly to escape from larger predators, but possibly also used to pursue fast-moving prey like flying insects.
And whether varanopids were actually synapsids or sauropsids, this makes Cabarzia the earliest known example of an animal running on two legs.
———
Nix Illustration | Tumblr | Twitter | Patreon
#science illustration#paleontology#paleoart#palaeoblr#cabarzia#varanopidae#amniote#tetrapod#art#bipedal#gotta go fast
286 notes
·
View notes
Photo

Tricky espeon
Look how tricky Gai the espeon is, spoiling me on stream, but not expecting a revenge >:3
Posted using PostyBirb
14 notes
·
View notes
Photo

Weretober 2023 Day 2 Boar
Twitter https://x.com/sifyro/status/1708995611800875202?s=20
----------
Other art sites wlo.link/@sifyro
Posted using PostyBirb
41 notes
·
View notes
Text

Don't mind me, just experimenting~ (No I will not ditch their usual chibi/feral forms ;3)
#pokemonart#pokemonfanart#pokemon#eeveelution#eeveelutions#pokemon fanart#digitalpainting#pokemon art#flareon#cat#anthro#furry#furry oc#bipedal
18 notes
·
View notes
Text
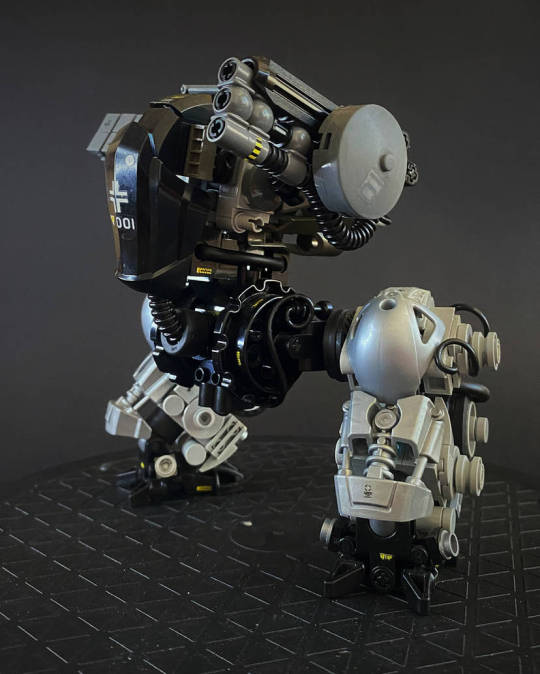
KZ.20 Mech [Advanced Design]
An even greater tool for the dispensing of sweet DEMOCRACY!!!!
Source
Creator: marcomarozzi
#lego#bionicle#armor#armor plates#mech#mechanical#machine#war#war machine#vehicle#walker#tubes#hydraulics#robot#robotic#robotic unit#guns#machine gun#cannon#bricks#faceless#armless#cannons#bipedal
36 notes
·
View notes
Text


Ruferu
#Ruferu#persona users#Bipedal#Owl-like creature#P5X#Persona 5: Phantom X#Metaverse#Real world#Tonfa#reliable partner
22 notes
·
View notes
Text

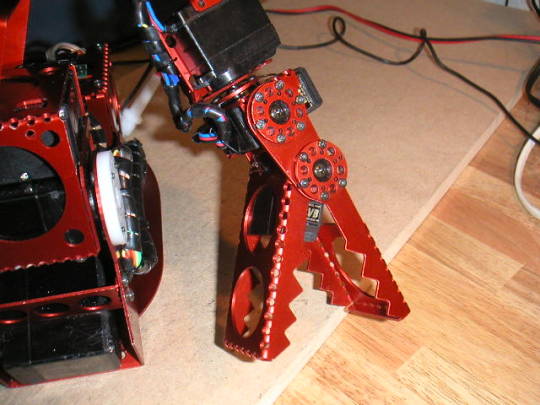

OmniStriker (2003) by Takeshi Maeda, Vstone, Osaka. OmniStriker is a bipedal humanoid competition robot, entered into ROBO-ONE 5. It's a variation on OmniDream, using JR DS8511 servos made for model aeroplanes. One hand is a gripper that can grab things, while the other hand can expand and contract to throw a punch. The same size as OmniDream, OmniStriker is much lighter at 2.5kg.
"So, I don't want to send the same robot to the ROBO-ONE NBC CUP, which is already tomorrow, so I tried adding a gripper. … with the addition of two servos, it became heavier, so I had to redo all the motions. The world's first (maybe) sword drawing motion. This is not the time to do something like this. Moreover, I wonder if there will be a demonstration at NBC CUP… Motions like this can't be used in actual combat, so it's meaningless without a demo.
Speaking of what to do with a gripper, it's all about drawing a sword. This time I tried pulling it out from my waist instead of my back. And just like before, it's useless in actual combat. I need to learn how to walk before I do something like this… The only thing I could think of to do with a stretched hand was a punch with a long reach…" – Takeshi Maeda, Robotan Production Diary.
At ROBO-ONE 5 in December 2003, OmniStriker came 1st in the preliminary round, but was runner-up in the final, after failing to stand up.
24 notes
·
View notes
Text
The canine way of jumping onto your bed and circle around till you drop and sleeping head to butt. ♥️🐺🐾🐾
#werewolfkin#werewolf#therianthropy#werewolves#wolf#therian#wolfkin#wolfblood#wolfing out#clinical lycanthropy#lycanthropecore#lycanthrope#lone wolf#lycanthropy#lycan#quadrupedal#bipedal#monster#alterhuman#nonhuman
56 notes
·
View notes
Text
Featherless.
Biped.

This is a man.
#dougie rambles#personal stuff#featherless biped#featherless#biped#bipedal#guns#DMR#sniper#man#this is a man#diogenes#plato#my poor attempt at a joke#what#no context#shitpost#highbrow shitposting#this sounded funnier in my head#shut up#behold a man
8 notes
·
View notes
Photo

Meet Morgan The Braixen x Mimikyu Rascal Foxxo
Shrouded in mystery and adept at crafting, Morgan is a playful and naughty fox who delights in causing chaos and mayhem. Nobody really knows who they are, they just showed up one day and struck around.
Posted using PostyBirb
#artistontumblr#cute#melgoesmeow#coffeemelke#artist#art#pokemon#pokefusion#fusion#original#fan#character#design#fox#bipedal#mimikyu#braixen#ghost#dark#type#furry#anthro#morgan#non-binary#gender#shadow#magic#fantasy
10 notes
·
View notes
Text

#introverted-character-town#digital#tumblr artist#alleyballey#Inktober#Anthro#anthropomorphic#scalie#scaly#scalie art#scaly art#anthro art#biped#bipedal#humanoid#furry#furry art#furry community#Original character#OC#character#character art#original character art#character artist#character design#Artist#Digital#Digital artist#digitalartist#digital-artist
9 notes
·
View notes

Last Seen Blogs

maricupcake927
marierierieri




friendlyneighbourhood-parker
online trash