#drawface
Photo

Finalizado! #sasuhina #sasuhinacouple #Sasuke #hinata #sasuhinaart #sasuhinafanart #sasuhinastan #drawsasuhina #drawfanart #drawface #drawanime https://www.instagram.com/p/CdmDnpsL8D2/?igshid=NGJjMDIxMWI=
#sasuhina#sasuhinacouple#sasuke#hinata#sasuhinaart#sasuhinafanart#sasuhinastan#drawsasuhina#drawfanart#drawface#drawanime
2 notes
·
View notes


Text


My drawing
30 notes
·
View notes
Photo
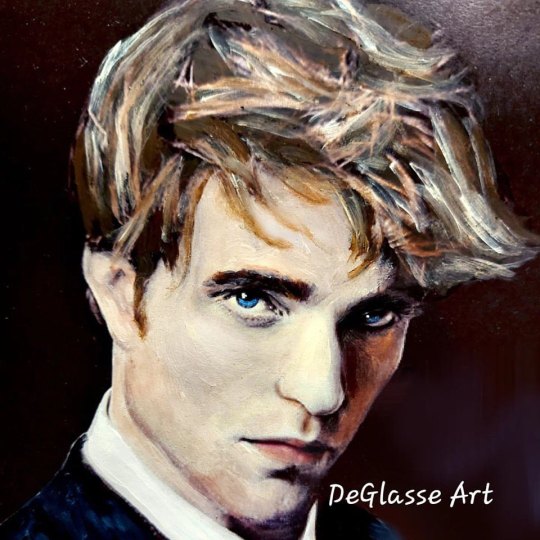
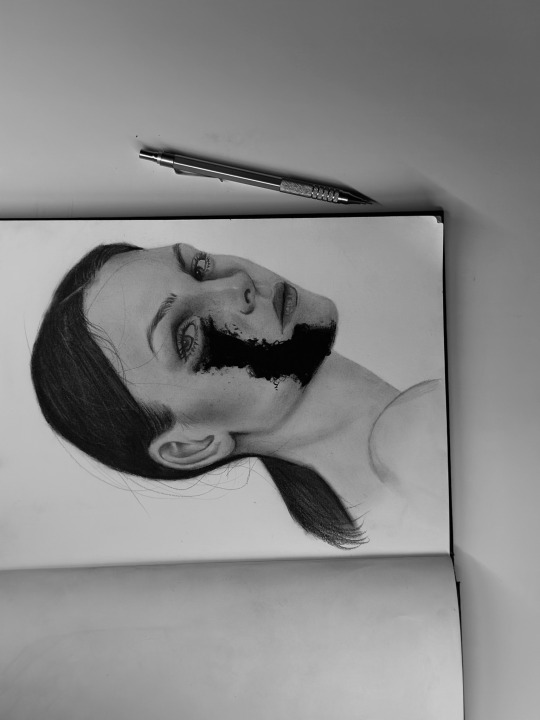
Repost from @deglasse.art • Work in progress... Fifty shades... #paintedportrait #portrait_painting #portraitdraw #drawportraits #drawfaces #robertthomaspattinson #diorambassador #malemodelsofinstagram #twilightvampire #artinspiresart #robpattz #robertpattinsonpictures #robertpattinsonmemes #watercolourportraits #mixedmediaportrait #mixedmediaportraits #creativepaintings #workinprogressartwork #workinprogresspainting #workinprogress🎨 #brucewaynefanart https://www.instagram.com/p/ClZ2P7epkqi/?igshid=NGJjMDIxMWI=
#paintedportrait#portrait_painting#portraitdraw#drawportraits#drawfaces#robertthomaspattinson#diorambassador#malemodelsofinstagram#twilightvampire#artinspiresart#robpattz#robertpattinsonpictures#robertpattinsonmemes#watercolourportraits#mixedmediaportrait#mixedmediaportraits#creativepaintings#workinprogressartwork#workinprogresspainting#workinprogress🎨#brucewaynefanart
2 notes
·
View notes
Photo

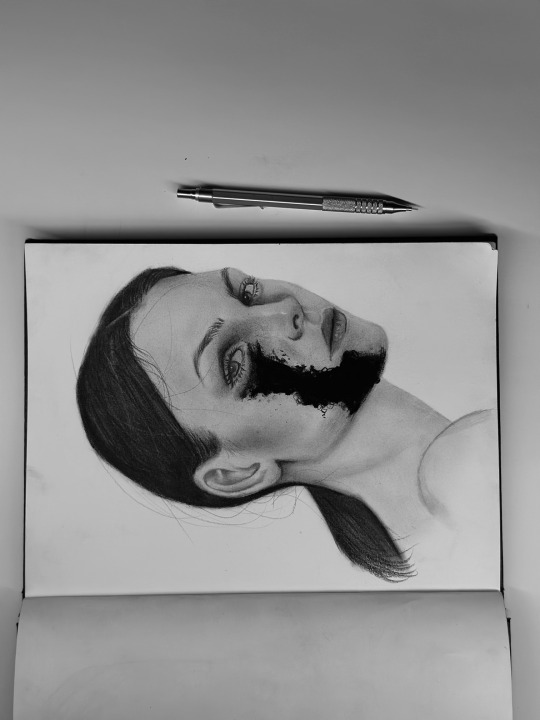
Happy Sunday! . . . #art #artwork #sketcheveryday #sketch #sketches #drawing #draw #drawdaily #drawportrait #drawingfromreference #drawinggirl #drawfaces #portraitsketches❤️ #portraits #portraitart #pencilcrayonart #pencilcrayonportrait #portraitillustration #portraitartwork #portraiture #sketchbook #draweveryday #practiceoften #artoninsta #instaart #traditonalart #traditionaldrawing #dailysketch #practice https://www.instagram.com/p/Cg-ZUeXPd89/?igshid=NGJjMDIxMWI=
#art#artwork#sketcheveryday#sketch#sketches#drawing#draw#drawdaily#drawportrait#drawingfromreference#drawinggirl#drawfaces#portraitsketches❤️#portraits#portraitart#pencilcrayonart#pencilcrayonportrait#portraitillustration#portraitartwork#portraiture#sketchbook#draweveryday#practiceoften#artoninsta#instaart#traditonalart#traditionaldrawing#dailysketch#practice
0 notes
Text
Vanity basins in Sydney, offering a combination of design, style, and functionality
The size and shape of the vanity basin in Sydney that you should choose for your bathroom will depend on who will use it, children or adults, and whether you experience a morning rush time. If you experience morning rush hour in the bathroom, then a double vanity basin Sydney is what you need. Vanity basins can have no tapholes, one, or three tapholes. They are usually made from a composite material, engineered from minerals and resins to offer a smooth, solid finish.
Ceramic is one of the most popular materials used in the construction of vanity basins Sydney. It’s an extremely robust and hard-wearing material. The material resists scratches and stains, and can effectively withstand the harshness of everyday use. These vanities are a practical option for kids as these require a little maintenance, and are also easy to clean. Ceramic vanity basins are usually available in a high gloss white finish but they are also available in other finishes such as grey, black, and matte white.
Vanity basins Sydney can be divided into the following six categories:
Wall basins
Above counter basins
Vanity basins
Semi recessed basins
Under counter basins, and
Insert basins
Vanity basins Sydney made of fireclay are composed of clay and other minerals that provide it with a tougher exterior. These are more durable than ceramic basins as the material is non-porous, and is also resistant to heat, scratches, and stains. This way, the vanities offer a perfect combination of style, design, and functionality. Vanities made of stainless steel offer a sleek and elegant statement with super thin edges. Stainless steel vanity basins Sydney are available in the finishing of brushed brass, brushed nickel, and brushed gunmetal.
Floor-standing vanity basins Sydney available at Austpek Bathrooms include:
Otti Boston Matte Grey Double Bowl Floor Standing Vanity
Aulic York White Oak Left Hand Drawer Free Standing Vanity
Poseidon Acacia Shaker Matte Black Single Bowl Floor Standing Vanity
Sunny Pure Series Free Standing Vanity and Basin
Aulic Rocky Gloss White Free Standing Vanity
Infinity Kingo Black Vanity
Aulic Lola Grey Single Bowl Free Standing Vanity
Poseidon White Oak Floor Standing Vanity
Otti Marlo Matte Black Double Bowl Floor Standing Vanity
The large selection of bathroom vanities Sydney elevates the functionality and elegance of your bathroom. The vanities are available in a variety of shapes and sizes to fit any bathroom size. If you have a subdued bathroom design, you can choose from a selection of oval or circular sinks and basins that can be placed on top of the counter.
Here are some more choices for you in bathroom vanities Sydney available at Austpek Bathrooms:
Otti Byron Natural Oak Wall Hung Vanity
Aulic Tucsana Wood Grain Wall Hung Vanity
Poseidon Petra Matte White and Matte Black Single Bowl Wall Hung Vanity
Aulic Petra Curved Matte White Wall Hung Vanity
BTH Shaker Profile Matte White Floor Standing Vanity
Infinity Thena White Wall Hung Vanity
Otti Bondi Natural Oak Curve Wall Hung Vanity
B&H Judy-Pro Wall Hung Vanity Matte Grey + Snow White
Duraplex Alana VC Timber Drawface Vanity Gloss White
Counter basins offer a perfect storage solution, and these are an ideal choice for small bathrooms. A corner bathroom will perfectly match your bathroom corners, and will not require any counter space. A pedestal basin has plumbing fittings and connections protected by a pedestal that supports the floor. A semi-recessed basin would be prefect for small bathrooms and ensuites.
#wall hung vanity#Buy wall hung Vanity for Bathroom#vanities online australia#vanities for bathroom#Quality Bathroom Vanities#wall hung vanity australia#Bathroom Vanity Cabinets#Bathroom Vanity Units#Bathroom Vanities#bathroom vanities nsw
0 notes
Photo
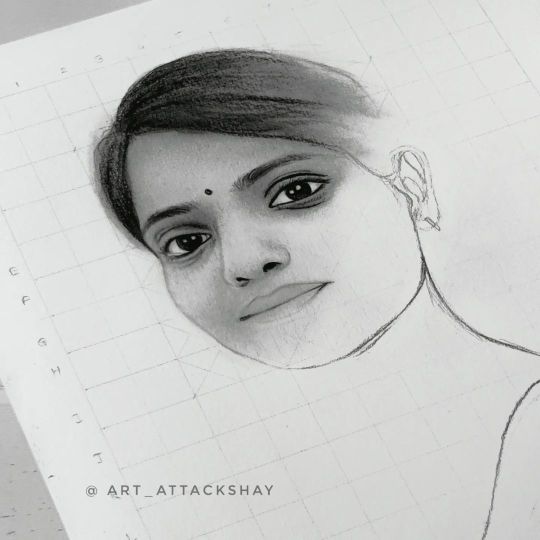
Face Shaddds... DM for Customized Artwork @art_attackshay #face #draw #shading #pencilshading #pencil #pencilart #charcoalpencil #charcoal #artwork #drawings #paint #painting #pencilgrip #pencilgram #instaphoto #artwork #faceshape #faceshadingtechniq #shadingtutorial #shadingbrows #hairstyles #hairsdraw #hairdrawing #eyesdrawing #eyedraw #lipsdrawing #lipstickshades #lipsdraw #drawface #drawpencil #penciling (at Maharashtra) https://www.instagram.com/p/ChvmqoJBYQi/?igshid=NGJjMDIxMWI=
#face#draw#shading#pencilshading#pencil#pencilart#charcoalpencil#charcoal#artwork#drawings#paint#painting#pencilgrip#pencilgram#instaphoto#faceshape#faceshadingtechniq#shadingtutorial#shadingbrows#hairstyles#hairsdraw#hairdrawing#eyesdrawing#eyedraw#lipsdrawing#lipstickshades#lipsdraw#drawface#drawpencil#penciling
1 note
·
View note
Text
The Passive_aggressive Hat final code
The final project code. A few minor tweets to improve sensor readings and clean up code where possible.
#define HAPPY 1
#define SAD 2
#define RESTING 3
// Set-up low level interrupts for most accurate BPM maths
#define USE_ARDUINO_INTERRUPTS true
#include <LedControl.h>
#include <binary.h>
#include <Servo.h>
#include <PulseSensorPlayground.h>
Servo myServo;
// The LED on the Arduino board
const int LED13 = 13;
// 'S' signal pin connected to A0
const int PulseWire = 0;
// signal pin connected to A2
const int GSR = A2;
// Determine which Signal to "count as a beat" and which to ignore
int Threshold = 500;
// Servo position
int pos = 0;
// GSR sensor values
int sensorValue = 0;
int gsrAverage = 0;
PulseSensorPlayground pulseSensor;
/*
DIN connects to pin 12
CLK connects to pin 11
CS connects to pin 10
*/
LedControl lc = LedControl(12,11,10,1);
// delay between faces
unsigned long delaytime = 1000;
// happy face
byte hf[8]= {B00000000,B01100110,B01100110,B00000000,B01000010,B00111100,B00000000,B00000000};
// neutral face
byte nf[8]= {B00000000, B00000000,B01100110,B00000000,B00000000,B01111110,B00000000,B00000000};
// sad face
byte sf[8]= {B00000000,B00100100,B01000010,B00000000,B00000000,B00111100,B01000010,B00000000};
void setup() {
lc.shutdown(0,false);
// Set the brightness to a medium values
lc.setIntensity(0,8);
// and clear the display
lc.clearDisplay(0);
// attaches the servo on pin 3 to the servo object
myServo.attach(3);
// Configures the PulseSensor and GSR by assigning our variables to them
Serial.begin(9600);
pulseSensor.analogInput(PulseWire);
pulseSensor.blinkOnPulse(LED13);
// Blink onboard LED with heartbeat
pulseSensor.setThreshold(Threshold);
// Check the "pulseSensor" object was created and began seeing a signal
if (pulseSensor.begin()) {
Serial.println("PulseSensor object created!");
}
}
void drawFaces(uint8_t mood) {
// Display sad face
if (mood == SAD) {
lc.setRow(0,0,sf[0]);
lc.setRow(0,1,sf[1]);
lc.setRow(0,2,sf[2]);
lc.setRow(0,3,sf[3]);
lc.setRow(0,4,sf[4]);
lc.setRow(0,5,sf[5]);
lc.setRow(0,6,sf[6]);
lc.setRow(0,7,sf[7]);
}
// Display neutral face
if (mood == RESTING) {
lc.setRow(0,0,nf[0]);
lc.setRow(0,1,nf[1]);
lc.setRow(0,2,nf[2]);
lc.setRow(0,3,nf[3]);
lc.setRow(0,4,nf[4]);
lc.setRow(0,5,nf[5]);
lc.setRow(0,6,nf[6]);
lc.setRow(0,7,nf[7]);
}
// Display happy face
if (mood == HAPPY) {
lc.setRow(0,0,hf[0]);
lc.setRow(0,1,hf[1]);
lc.setRow(0,2,hf[2]);
lc.setRow(0,3,hf[3]);
lc.setRow(0,4,hf[4]);
lc.setRow(0,5,hf[5]);
lc.setRow(0,6,hf[6]);
lc.setRow(0,7,hf[7]);
}
}
int pulseReading() {
int myBPM = pulseSensor.getBeatsPerMinute();
// Calculates BPM
if(pulseSensor.sawStartOfBeat()) {
// Constantly test to see if a beat happened
Serial.println("♥ A HeartBeat Happened ! ");
// If true, print a message
Serial.print("BPM: ");
Serial.println(myBPM); // Print the BPM value
}
delay(20);
return myBPM;
}
long gsrReading() {
long sum = 0;
//Average the 10 measurements to remove the glitch
for (int i = 0; i < 10; i++)
{
sensorValue = analogRead(GSR);
sum += sensorValue;
delay(5);
}
gsrAverage = sum / 10;
Serial.print("GSR: ");
Serial.println(gsrAverage);
return gsrAverage;
}
uint8_t currentMood() {
int pulse = pulseReading();
long gsr = gsrReading();
//Readings that work work me wearing the GSR and pulse sensor
if((gsr >= 301) && (gsr <= 425) && (pulse >= 90) && (pulse < 200)) return SAD;
if((gsr >= 100) && ( gsr <= 299) && (pulse <= 61)) return HAPPY;
if((gsr >= 450 ) && (pulse <=500) && (pulse <=550)) return RESTING;
}
void servoControl() {
// goes from 0 degrees to 180 degrees
for (pos = 0; pos <= 180; pos += 1) {
// in steps of 1 degree
myServo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myServo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
void loop() {
uint8_t mood = currentMood();
drawFaces(mood);
if (mood == SAD) servoControl();
}
0 notes
Photo
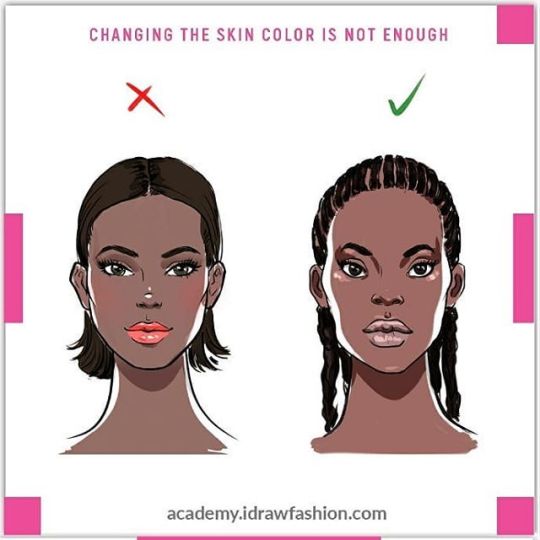
Have you ever tried to draw a black model 👩🏾✋🏿 ? Did it look off but you couldn't tell exactly why? Many artists face the same problem. 💔 . All tutorials online focus on how to draw white models only.👩 They don't teach us how to draw women of color and create diversity in our art. . Changing the color of your colored pencil won't make a big difference. You also need to adjust the facial features - lips, eyes, nose and face shape AND body shape of your model ! . ✅In my online course "HOW TO DRAW FACES" I teach my students how to draw African American,👩🏿 Asian,👩🏻 Indian 👩🏽 and Native American models STEP-BY-STEP. . 🎥Videos, 📗Tutorials and 👌Personal feedback are part of the course. . If this sounds like something you'd be interested in learning ➡ Go to academy.idrawfashio.com ⬅ & join the course now! . . . . . #blackwomenart #blackwomenartists #blackwomanart #drawface #facedrawing #fashionclass #fashioncourse #drawingtutorials #aspiringdesigner #fashionworkshop #fashioncourses #fashionfigure #fashionstudents #drawingcourse #fashioneducation #drawinglesson #fashioncollege #schoolfashion #fashiondesignstudent #fashionsketching #collegefashion #fashiondrawings #youngdesigner #howtodraw #learntodraw #fashionstudent #designdemoda #fashionschool #fashiondrawing #fashionillustrations
#fashioncourses#collegefashion#youngdesigner#schoolfashion#fashionstudent#blackwomenartists#fashionfigure#fashioncourse#fashioneducation#fashiondesignstudent#fashionworkshop#blackwomanart#blackwomenart#fashionstudents#designdemoda#drawingtutorials#fashionschool#drawface#howtodraw#learntodraw#fashionsketching#facedrawing#fashiondrawing#fashionclass#drawingcourse#fashioncollege#drawinglesson#fashionillustrations#fashiondrawings#aspiringdesigner
12 notes
·
View notes
Photo

AV0.cato #drawdigital #digitaldraw #draw #edit #edition #editor #drawface #me #avocato #littleavocato #finalspace #netflix #garygodspeed #gary #KVN #HUE #mooncake #littlecato #lordcommander #triboremenendez #quinnairgon #serie #bangun #shitpost #shitposting @avocato_postinggg @olanrogers https://www.instagram.com/p/B9ptPqtHbFD/?igshid=d4ckz98brgdd
#drawdigital#digitaldraw#draw#edit#edition#editor#drawface#me#avocato#littleavocato#finalspace#netflix#garygodspeed#gary#kvn#hue#mooncake#littlecato#lordcommander#triboremenendez#quinnairgon#serie#bangun#shitpost#shitposting
2 notes
·
View notes
Photo

Worked on the picture some more! I can’t believe I was able to do the hair!!!!!
Honestly I am really happy with this so far-
1 note
·
View note
Video
#hinata #hinatafanart #hinatamodern #hinatahyuga #doodles #drawface #Draw #clipstudiopaint #fanartanime #Naruto #pratic https://www.instagram.com/p/CdmcEBkFtjO/?igshid=NGJjMDIxMWI=
#hinata#hinatafanart#hinatamodern#hinatahyuga#doodles#drawface#draw#clipstudiopaint#fanartanime#naruto#pratic
0 notes
Text

"Cry.
#ilustracion#inkart#arte#inkillustration#lineart#black and white#art#illustration#inkdrawing#artist#artwork#drawface#traditional art#my art#Love#butterfly#artists on tumblr#ink
8 notes
·
View notes
Photo
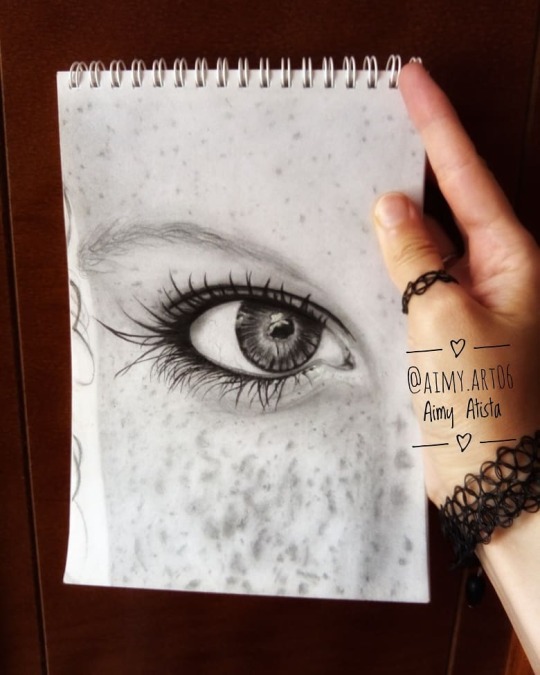
Just i want to be better … Thanks to everyone who encouraged me💮🌸
👉💞@aiimyart
#eye #eyes #eyedraw #eyesdraw #pencil_drawing #pencilart #pencilportrait #portrait #portraitdrawings #eyeportrait #artiste #art #eyeart #eyeface #drawface #face #look
https://www.instagram.com/p/B0ql0lnHT9a/?igshid=gn3prxrg2odn
#eye#eyes#eyedraw#eyesdraw#pencil_drawing#pencilart#pencilportrait#portrait#portraitdrawings#eyeportrait#artiste#art#eyeart#eyeface#drawface#face#look
1 note
·
View note
Photo

As promised this is my sketch of Loish. I think her face is very unique. I realized she looks like her artwork a whole lot. It's like her characters are her children. I wanted to make the attempts to draw her more realistic but I was really nervous and so this is what was born of it. The first attempt was very cartoony, which was not my intention, the second I did a lot of rubbing because of the angle. The last one I gave my best shot by just simply letting go. The green one is my favorite and the blue one my second favorite. All the references I used to make these sketches were shots taken from her tutorial videos where she was talking and moving a lot. In future I want to do something more realistic of her face. What do you guy's think of my sketches? Comment down below, also swipe for closer ups. #Loishfan #art #artwork #sketcheveryday #sketch #sketches #drawing #draw #drawdaily #drawportrait #drawingfromreference #drawinggirl #drawfaces #portraitsketches❤️ #portraits #portraitart #pencilcrayonart #pencilcrayonportrait #portraitillustration #portraitartwork #portraiture #sketchbook #draweveryday #artoninsta #instaart #traditonalart #traditionaldrawing #dailysketch #practice https://www.instagram.com/p/CghE18KuUnq/?igshid=NGJjMDIxMWI=
#loishfan#art#artwork#sketcheveryday#sketch#sketches#drawing#draw#drawdaily#drawportrait#drawingfromreference#drawinggirl#drawfaces#portraitsketches❤️#portraits#portraitart#pencilcrayonart#pencilcrayonportrait#portraitillustration#portraitartwork#portraiture#sketchbook#draweveryday#artoninsta#instaart#traditonalart#traditionaldrawing#dailysketch#practice
0 notes
Last Seen Blogs

anordinarybuttercup
❀ AnOrdinaryButtercup ❀

professorvanhelsing
abby

hofudlaus
wow

americarept
AmericarePT

daisies-daydreams
Daisies & Daydreams