#robot leg
Text
posting a tease to bully youuu :3

#cyborg bits#transbian#robot girl#robot fucker#cyborg girl#monster fucker#art#lesbian#hips#robot hips#mechanical art#robot leg#robot arm#android#cybernetics
19 notes
·
View notes
Text
Characters who simp for girls with robot limbs
Blake Belladonna

Lauda Neill

Feel free to add any more examples you can thing of
#wooloo-writes#wooloo writes#rwby#gundam witch#g witch#petra itta#lauda neill#blake belladonna#yang xiao long#bumbleby#gundam the witch from mercury#robot limbs#prosthetic limbs#girls with robot limbs#robot arm#robot leg
41 notes
·
View notes
Text

Battle for Amphibia : Marcy Wu
Since the first sketches, I felt I needed to expand more my ideas and to make you discover all about that AU.
So here is BfA!Marcy !!
Hope you'll enjoy and if you have questions, dont hesitate to ask me anything on my ask blog.
106 notes
·
View notes
Text
Baby Steps - Creating A Walking Robot

More to come on this as it progresses, but I've been constructing a robotics project heavily based upon work by the Max Planck Institute robot called Bird Bot.
This leg design is biologically inspired, using bird legs (such as the Emu) as inspiration. The design has been found to be very energy efficient, which is one of the motivations for my own use over a Boston Dynamics style spot robot dog design choice. Here is an image from the researcher's own paper to show the general design.

Below is the robot that the Max Planck Institute Researchers created. The researchers do have their own 3D print files for anyone to use if they want to re-create this exact design.

For my own purposes, I'm using my own leg designs created from scratch, but taking heavy inspiration from the above. The mechanism has been taken directly from this research paper.
Early stages of prototyping in progress using the 3D printer, with round 2 on the way. I'm definitely more of a software person, than an electronics/robot person, so I'm not attempting anything completely experimental and new!
With the MARVINA AI system, I think this platform will be far better suited to actually interacting with people than the Roomba (as sweet as the Roomba is) .
References:
- BirdBot achieves energy-efficient gait with minimal control using avian-inspired leg clutching | Science Robotics
6 notes
·
View notes
Text
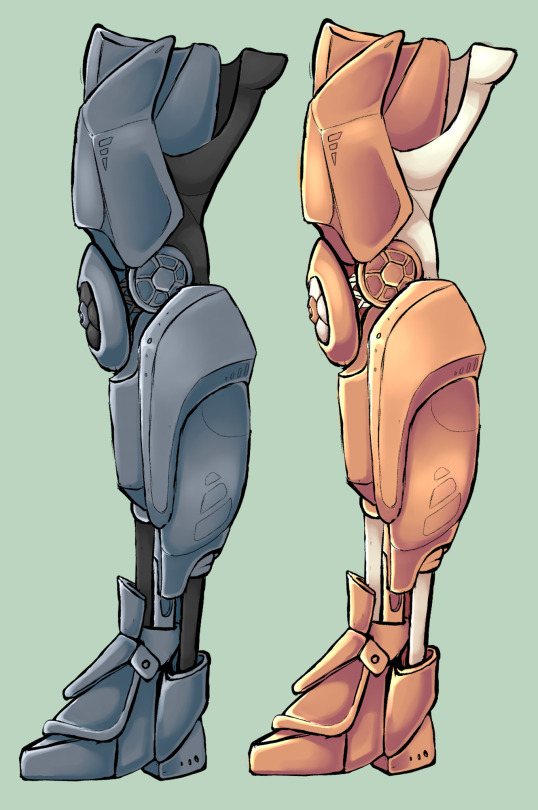
Robot practice continues!
and YES it is branch out time, so I have made some leg.
When I started the design I was thinking about it having a very heavey industiral look, which is where the colour scheme for the left one came from. but playign around I had a lot of fun with how different the vibe became with the differnet colours
so you get to see both :)
23 notes
·
View notes
Text

Another robot limb
#artblr#art tumblr#artwork#digital art#my art#artists on tumblr#original art#art#robot art#art of robots#robot leg#robot limb
0 notes
Text

This is my art fight attack on @th3crazyguard1an 's Kalea! She was a lotta fun to draw and I think I made the right choice using a line-less style for her!
0 notes
Text

I think this is like the most effort I ever put into something that was supposed to be a funny goofy but then turned into me giggling and kicking my feet. I'm in need for soft Moon cuddles, with all his gremlin energy still present...
Close ups, mostly Moon's limbs because I like how they're gripping the net fkdkkd



And finally the "reference" that started it all lmao😭

#my art#i keep forgetting that i can actually record my process lmao#whatever#moondrop#fnaf moondrop#fnaf moon#moondrop fnaf#moon fnaf#moon x reader#moondrop x reader#self insert#i just realised that his legs are so fucking long like wAY too long#but also he's a robot he can have whatever legs he wants. or i want.
4K notes
·
View notes
Text

attributes!scar's mobility aids
#they are worn under his regular pants/boots and designed to give his legs support + robotically mimic how muscles expand and contract#attributes au#goodtimeswithscar#goodtimeswithscar fanart
2K notes
·
View notes
Text

love the fact pearl likes being a robot like you go girl
#pearl showing up to the splatoon matrix/simulation like marina they took my fucking legs. never mind this fucks i can fly now#running theory is that the side order world is a simulation and pearl's form in the simulation is just a robot for some reason#splatoon#my art#side order#pearl houzuki#pearl splatoon#splatoon 3
3K notes
·
View notes
Text
im on my bs yall /lh/j
sorry im gonna be not normal abt tf:one but i watched the trailer again and realized somethin wasn't quite right w the way elita-1/ariel moved
and yall
I REALIZED IT LOOKED OFF AND I ZOOMED IN AND???
SHE ROUNDHOUSE KICKS BUT SHE KEEPS A FOOT F I R M L Y PLANTED. HOMEGIRL SWIVELS HER HIPS INDEPENDENTLY OF HER TORSO AND LEG TO GET POWER BEHIND THE KICK. IT MAKES TOTAL SENSE SHE'S A ROBOT SHES NOT A HUMAN HER JOINTS ARE DIFFERENT THAN OURS.
STILL. THATS SO COOL AND IT ALSO ISNT ANYTHING I WOULD HAVE THOUGHT OF MYSELF. THATS SO COOL.
#CYBERTRONIAN ANATOMY MY BELOVED#this does raise some Questions#are the legs literally ball sockets? are there no connecting wires?#but the questions are being ignored due to sheer UTTER EPIC FACTOR#BRO I HADNT EVEN THOUGHT OF THAT#the joints being able to move independently of each other... for a robot it makes SENSE#IM GONNA GO INSANE??? THIS IS ACTUALLY SUCH A COOL IDEA#imagine what else could be done with this... imagine epic battles where they can move in ways humans just CANT bc theyre NOT HUMAN#AND THEIR JOINTS ARE DIFFERENT#ITS AN ENTIRE NEW WAY TO FIGHT AND IM GONNA SCREAM ITS SO COOL#transformers#transformers one#maccadam#elita 1
472 notes
·
View notes
Text

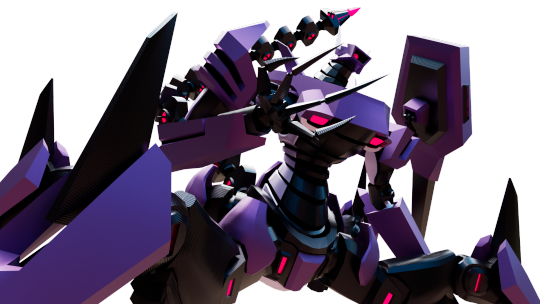
Shockwave, as he appears in #TransformersTheMimic by TheAmazingSpino on twitter is finally finished! By far my most ambitious 3D model yet. Fully rigged and textured, and available for download here!
#TransformersTheMimic#transformers#the mimic#small artist#digital art#artists on tumblr#artwork#artist#art#mecha#robot#3D#3d render#download#shockwave#daddy long legs#macaddam#maccadam
619 notes
·
View notes
Note
Imagine you have unlimited time and budget to work on a Amphibia AU, wich one will you choose and why?
And why not add a little doodle of said AU? B)

Well, I have a personal AU that I would want to make with that kind of resources.
"During the events of True Colors, the Calamity box is destroyed preventing any ways for the girls to come back on Earth. Everyone succeed to escape the royal palace but Anne and Marcy lose an arm and and leg respectively. Anne tried to save Marcy from Andrias's sword but by doing so, he sliced their limbs.
Now being stuck in Amphibia, everyone try to find another way to open a new portal. Luckily, Sasha took the red gem with her, while the other two are with Andrias. Valeriana shows up and propose to Sasha to train her to master her new power, and Anne too because she kept a piece of her gem's power.
While doing that, Amphibia must also prepare to fight against Andrias and his new robot army.
13 years passed, while Anne and Sasha get stronger and got along with their new life, Marcy still preserves her regrets and blames herself for everything."
Just to warn you, it's just a premise, even the drawing is a rough sketch (I plan to give them new look and armor).
Truly, if you are interested to see more. You can ask questions about it or even ask for doodles of others characters in that AU.
#amphibia#anne boonchuy#sasha waybright#marcy wu#amphibia au#calamity sasha#robot arm#robot leg#ask me anything#battle for amphibia
38 notes
·
View notes
Text
Baby Steps - Creating A Walking Robot - Part 2: Trials and Tribulations
Software Software Software
It's been a while since the last post. Time hasn't been kind unfortunately, and I've been far more focussed on the software side of creation, along with work and personal commitments.
Software design has been mainly relating to CNN feature extractors for proprietary bounding box models, and considering ways of creating "curiosity" networks to allow AI systems to determine if new input is similar to that they've "seen" before.

Using "curiosity" as an additional means of determining self-reward with reinforcement learning should be a fun approach.
On reflection, it also highlights my own motivations as a person - somewhat projecting them onto this design. Something to consider when it comes to designing the integrated system.
Robotic Design Limitations:
Unfortunately, while the research team creating birdbot had plenty of time to refine and tweak their design, I do not. The bird-bot robotic leg design has been too fiddly to create in the time I've had to implement it.
The use of tensioned wires, 3D PLA material, and my amateur experience in prototyping have been an excellent learning experience, but frankly if it takes this much effort to set up then it's going to be hell re-tensioning, and re-jigging things, once up and running.
A New Hope:
Never let perfect be the enemy of good.
Birdbot may have likely been more energy efficient, but getting things moving is more important. I can always revisit it in the future.
While the birdbot inspiration hasn't been as successful, I do have other options to look at. I'm reverting to using a design based on Agility Robotic's Cassie model. Some of the degrees of freedom won't be practical with the size of the unit, and the servos, so not an exact copy - but similar enough to know that it's practical and has a track record that works.
This will involve less complexities of tensioned wiring, and instead should be easier to create, and simulate, allowing a greater focus on integrating the software into the design.

The Raspberry Pi multi-servo hat, remaining servos, and power supply are on their way, so hopefully I can get this moving (ha!) soon.
On the whole, things are progressing a bit more slowly than I'd hoped, but are beginning to get somewhere at least!
#robot#robotics#cybernetics#cybernetic#leg#robot leg#robot design#robots#ai#ai development#ai design#ai research
0 notes
Text
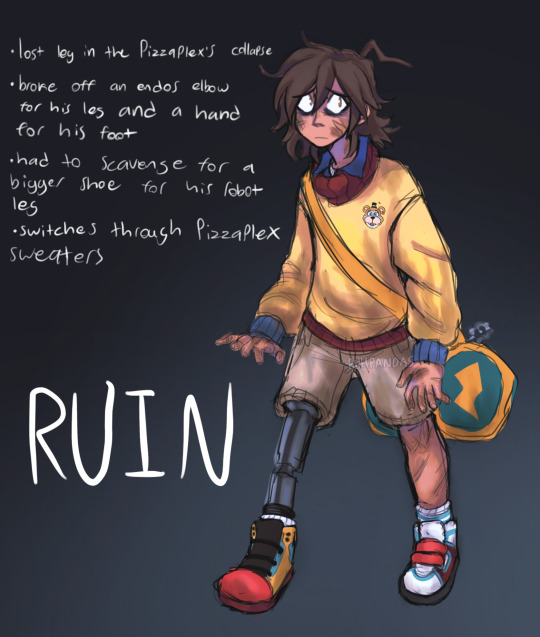
couldn’t stop thinking about if gregory will have a new design in ruin so here’s the one i keep imagining :)
#for some reason i imagine him to have a robot leg idk why#fnaf#fnaf fanart#five nights at freddy’s#five nights at freddy’s fanart#gregory fnaf#fnaf gregory#fnaf ruin#ruin fnaf#security breach ruin#ruin dlc#fnaf security breach#fnaf security breach fanart#fnaf sb#fnaf sb fanart#drawing tag#pre ruin
2K notes
·
View notes
Text

Robot leg
#artblr#art tumblr#artwork#digital art#my art#artists on tumblr#original art#art#robot art#art of robots#robot leg#mechanical#machine
1 note
·
View note
Last Seen Blogs


danp269
Untitled

nectarine-neuroticism
( ri )

gaycousinlarry
all of these thoughts
and the feelings

blessingchordd
(•°_°•)