#was also considering the possibility of the leg metaphor being the inverse
Text

Last life charoite take 2! Feeling a lot better with this design ^^
#gemcyt#i personally really like the twisted legs ^^#he’s tangled up 🤯 and neither half is letting go 🤯🤯🤯🤯#or one half is holding the other hostage 🤯🤯🤯🤯🤯🤯🤯🤯🤯🤯#anyway the arm stripes are the second best thing to come out of this#second only to the legs of course#was also considering the possibility of the leg metaphor being the inverse#like normal charo=intertwined / LL charo=frayed#makes more sense since they’d be tripping all over the place with four legs flopping around🤔#but idk i guess im ok with normal charo = loose / LL charo = tangled in knots#doodlegroves
1K notes
·
View notes
Text
A/B/Overse Redux: Omegas
The Omega, hundreds if not thousands of pieces of art depict them in all their mystery emerging from the brush with a hare dangling from their dagger-like canines. This image was burned across multiple cultural mindsets as it was often the first glimpse those from Alpha heavy cultures got. Those same Alphas would return home with tales of creatures like them who ran so quickly they caught the horizon and once a year when the wind started to chill would fall into lust crazed haze for days. Some packs would take these tales and paint new deities in their likeness while others would create rituals to ward off what were clearly demons intent on seducing them, most likely to lead them to their deaths.
In The Pack:
It wasn’t uncommon for the ancient omega in a balanced pack to take up the roll of scout, for hunting or other reasons, when they weren’t with pup at which point it would take something incredibly serious to move them from the den site. The den was often kept at the heart of the territory and was considered as such, with the den being the home of the pack’s future it was often the subject of attacks and raids. Omegas staying at the den site would hole themselves up at the first sign of danger using their bodies to block up the tunnels. To get to the pups an intruder would have to muscle their way past them and their natural inclination to go for the throat in a fight.
Many say that inclination wasn’t lost on the modern Omega though it’s more metaphorical nowadays. Even introverted Omegas are known to get snippy and defensive when they feel that their home is being invaded and the worst sin the parent of an Omegan child can commit is to walk in without knocking.
As A Leader:
Omegas are clever beasts and known to be flat-out cruel in a political circles, they’ll use force and persuasion interchangeably as they see fit to get the upper hand they need. Though they won’t turn up their nose as free territory they are much less worried about expansion then Alphas and borders tend to be fuzzy guidelines rather than the end all be all between outsider and intruder. Omega leaders will often focus on the heart of their charge, expending great energy make sure their people are ready to defend themselves.
Some will accuse Omegan leaders of being apathetic when in reality they are merely picky about the opportunities they wish to pursue, not wanting to waste more resources then necessary without a notable gain in a reasonable timeframe.
As A Loner:
The Omega loner is often painted in stories to be a seductive thief. It was common practice for the ancient omega to haunt the edges of large packs while in their pre-heat stage to tempt Alphas and Betas to join them, one child with unknown sireship and multiple possible sires invested in their upbringing later and the Omega has the foundation of their own pack. Modern anthropologists refer to these as Honeytrap Packs.
The modern Omega is left to struggle with this reputation and usually have a lot of trouble with in-laws when they don’t have their own to introduce. Pack Omegas aren’t often sympathetic to their fellow rankmates since these unrelated outsiders are still considered a threat on a subconscious level.
Appearance:
The Wolf – The wolf of the Omega is much more reminiscent of the jackal with a leaner, long-legged frame then a Beta or Alpha. The skull tends to be narrow but heavy, the muzzle is long to make snapping rodents out of their holes easy. Their ears are large as well capable of swiveling all the way back to detect sound. They’re light on their feet, the toes on their paws spread considerably to assist them in moving over the sandy terrain they usually inhabited.
The Human – Omegas are typically longed limbed but not necessarily tall. Many note that Omegas tend to have slender fingers and more likely to have knobby joints usually considered an early sign of arthritis which Omegas are more prone to developing. Omegas also tend to have wider hips since out of all ranks they are the most likely to bear young. Another health concern that plague the sharp tongued rank has to do with their high metabolism, many struggle to keep weight on and without a proper high nutrition diet Omegas can quickly spiral down into malnutrition and starvation in severe cases.
A shared trait between the two forms are the long canines securely rooted in the Omegas’ mouth.
Distribution:
Populations of ancient Omegas were densest in biomes that were arid with large expanses of flat land such as deserts, savannahs and prairies. On their own they would prey upon small quarry such as lizards, rodents and birds. With the help of Betas or large numbers they would take on larger prey such as deer or pronghorn, anything larger is usually left alone without Alphas as animals like bison or moose are too big for an Omega to safely bring down.
The modern Omega will be quick to complain about cold conditions but tend to be very fond of water with Omegas making up a majority of professional swimmers.
The Heat:
The Omega will feel their heat coming long before it actually arrives with the preheat phase lasting around six weeks. During the preheat phase the Omega will insistently seek out their partner for affection and play but be warned during this time of heightened tactility an Omega can easily be overstimulated and will snap. This will be the time that the Omega’s body is preparing for its heat, along with the tactility they will experience some discharge and a sharp change in scent.
The actual heat will last several days and it is only during this short period of time that they can conceive. At this point the Omega not only become receptive to mating but will be insatiable. To the point it’s not uncommon for pairs to open up their otherwise closed relationship to close friends for help. At the height of the heat the Omega may lose the ability to speak and will instead rely on growls and purrs to communicate.
Fertility and Virility:
The Omega’s incredibly high fertility is inverse to their almost nonexistent virility. Plenty of myths and superstitions surround their heats from home remedies to make them more tolerable when going through them alone to the belief Omegas could have prophetic visions at the height of their heat.
Should an Omega go through their heat with a partner and not become pregnant, baring the presence of contraception or sterilization, is considered reason for a prompt doctor’s appointment as it is very rare without it being a symptom of a larger health problem.
5 notes
·
View notes
Text
Uncanny Dimple
My final project Uncanny Dimple is a body of work that examines the close proximity between the cute and the creepy. Drawing from roboticist Masahiro Mori’s concept of the Uncanny Valley, which explains the eeriness of lifelike robots, my theory of the Uncanny Dimple portrays a parallel phenomenon in the context of cuteness. The robotic creatures inhabiting the dimple demonstrate the often contradictory affects we experience towards non-human actors. When does cuteness start to border on the grotesque? If cuteness is the outcome of extreme objectification of living beings, can it also be the result of an anthropomorphising inanimate objects? Why does cuteness trigger the impulse to nurture and to protect, but also to abuse and to violate? Cute things are often seen as innocent, passive, and submissive, but can they also manipulate, misbehave and demand attention?

This body of work is based on my MFA thesis Uncanny Dimple — Mapping the Cute and the Uncanny in Human-Robot Interaction, where I examine the aforementioned contradictions of cuteness by applying Donna Haraway’s Cyborg Manifesto (1991) and the Uncanny Valley theory by Masahiro Mori (1970). I also reference the recent research on the cognitive phenomenon of cute aggression, a commonly experiences impulse to harm cute objects. (Aragón et al. 2015; Stavropoulos & Alba 2018)
Sigmund Freud first coined the term uncanny in his 1919 essay Das Unheimliche to describe an unsettling proximity to familiarity encountered in dolls and wax figures. However, the contemporary use of the word has been inflated by the concept of the Uncanny Valley by roboticist Masahiro Mori. Mori’s notion was that lifelike but not quite living beings, such as anthropomorphic robots, trigger a strong sense of uneasiness in the viewer. When plotting experienced familiarity against human likeness, the curve dips into a steep recess — the so called Uncanny Valley — just before reaching true human resemblance.
As a rejection of rigid boundaries between “human”, “animal” and “machine”, Haraway’s cyborg theory touches many of the same points as Mori’s Uncanny Valley. Haraway addresses multiple persistent dichotomies which function as systems of domination against the “other” while mirroring the “self”, much like cuteness and uncanniness: “Chief among these troubling dualisms are self/other, mind/body, culture/nature, male/female, civilized/primitive, reality/appearance, whole/part, agent/resource, maker/made, active/passive, right/wrong, truth/illusion, total/partial, God/man.” (Haraway 1991: 59)
Haraway’s image of the cyborg, despite functioning more as a charged metaphor than an actual comment on the technology, still aptly demonstrates the dualistic nature of cuteness and its entanglements with the uncanny at the site of human-robot interaction. Furthermore, Haraway’s cyborg theory grounds the analysis of the cute to a wider socio-political context of feminist studies. In the Companion Species Manifesto where she updates her cyborg theory, Haraway (2003: 7) is adamantly reluctant to address cuteness as a potential source of emancipation (which seems to be the case with other feminists of the same generation): "None of this work is about finding sweet and nice — 'feminine' — worlds and knowledges free of the ravages and productivities of power. Rather, feminist inquiry is about understanding how things work, who is in the action, what might he possible, and how worldly actors might somehow be accountable to and love each other less violently." I argue on the contrary that some of these inquiries can be answered by exposing the potential of cuteness as a social and moral activator. While Haraway describes a false dichotomy between these “sweet and nice” worlds and “the ravages and productivities of power”, I believe that their entanglement is in fact an important site for feminist inquiry. By revealing the plump underbelly of cuteness, we can harness the subversive power it wields.
In my thesis I conclude that cuteness and uncanniness are both defined by their distance to what we consider “human” or “natural”, and shaped by the distribution of power in our relationships with objects that we deem having a mind or agency. I continue to propose that a similar phenomenon to the Uncanny Valley can be described in regard of cuteness, which I call the Uncanny Dimple. Much like Mori’s valley and Haraway’s cyborg, Uncanny Dimple is presented as a figuration: It does not necessarily try to make any empirical or quantitative claims about the experience of cuteness, but strives to utilise the diagram as a rhetorical device for better understanding the entangled affects of cuteness and uncanniness.
Similar to Mori’s visualisation of the Uncanny Valley, the Uncanny Dimple is mapped in a diagram where the horizontal axis denotes “human likeness”, but Mori’s vertical axis of “familiarity” is in this case replaced with cuteness. Similar to Mori, I propose that cuteness first increases proportionally with anthropomorphic features. As established in Konrad Lorenz’s Baby Schema model from 1943, cuteness also increase proportionally in the presence of neotenic (i.e. “babylike”) features, such as large eyes, tall forehead, chubby cheeks and small nose. I suggest that this applies only to some extent: When the neotenic features have reached a point where they are over-exaggerated beyond realism, but the total human likeness is still below the Threshold of Realism, cuteness climaxes at what I call the Cute Aggression Peak. When human likeness exceeds that point, cute aggression becomes unbearable, the experienced cuteness is surpassed by uncanniness, and the curve dips to the Uncanny Dimple.

I wanted to create various cute but uncanny creatures which all had their distinctive way of moving or interacting with the audience. I created multiple different prototypes of most of the creatures, and in the final installation I had eight different types:
1. Sebastian is an interactive quadruped robot that can detect obstacles. Sebastian will wake up if it's approaced, and run away. The inverse kinematic functions for the quadruped gait are based on SunFounder's remote controlled robot. In the basic quadruped gait three legs are on the ground while one leg is moving. The algorithm calculates the angles for every joint in every leg at every given time, so that the centre of gravity of the robot stays inside the triangle of the three supporting legs. I designed all the parts and implemented the new dimensions in the code. I also added the ultrasonic sensor triggering and obstacle detection. For calculating distance measurements based on the ultrasonic sensor readings I used the New Ping library by Tim Eckel.

2. Ritu is an interactive robotic installation using Arduino, various sensors, servo motors and electromagnet. Users are prompted to feed the vertically suspended robot, which will descend, pick the treat from the bowl, and take it up to its nest. There is a hidden light sensor in the bowl, which senses if food is placed in the bowl. This will trigger the robot to descend using a continous rotation servo motor winch. The distance the robot moves vertically is based on the reading of a ultrasonic sensor. The robot uses an electromagnet attached to a moving arm to pick up objects from the bowl. After succesfully grabbing the object, the robot will ascend and drop the object in a suspended nest. For calculating distance measurements based on the ultrasonic sensor readings I used the New Ping library by Tim Eckel.

3. Crawler Bois are two monopod robots that move with motorised crawling legs that mimic the mechanism of real muscles and tendons. Each robot has a leg that consist of two joints, two servo motors, a string, and two rubber bands. The first servo lifts and lowers the leg, and the second servo tightens the string (the "muscle") which contracts the joins. When the string relaxes, the rubber bands (the "tendons") pull the joints to their original position. The robots move back and forth in a randomised sequence and sometimes do a small dance.

4. Lickers are three individually interactive robots using servo motors, Scotch Yoke mechanisms, and sound sensors. The Scotch Yoke is a reciprocating motion mechanism, in this case converting the rotational motion of a 360 degree servo motor into the linear motion of a licking silicone tongue protruding from the mouth of a creature. If a loud sound is detected, the creature will stop licking and lift up its ears. The treshold of the sound detection can be modified directly from a potentiometer on the sound sensor module.

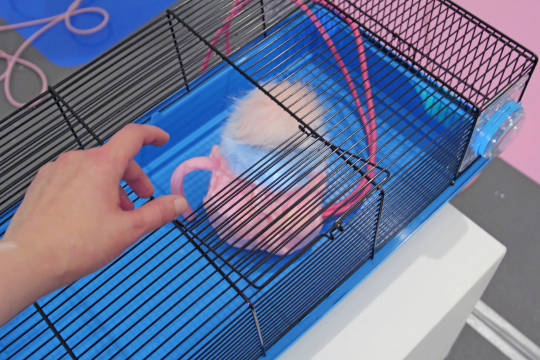
5. Shaking Little Critter is a simple interactive installation using an Arduino, a vibrating motor and a light sensor. Users are prompted to remove the creature's hat, after which it will "get cold" and start shaking around in its cage. The absence of the hat is detected with a light sensor on top of the creature's head.
6. Rat Queen is a robotic installation exploring the emergent features arising from the combination of pseudo-randomness and
mechanic inaccuracy. It consist of five identical rats-like robots that are connected to a shared power supply with their tails. All the members of the Rat Queen move independently in randomised sequences, but because they are started at the same time, the randomness is identical, since the random seed is calculated based on the starting time of the program. However, due to small inaccuracies and differences in the continuous rotation servo motors and their installation, the movement patterns diverge, and the rats slowly get increasingly tangled with their tails.

7. Cute Aggression is an interactive sound installation using Arduino and Max MSP. Users can record sounds by whispering in a hidden microphone in the plush toy creature's ear. A tilt switch in the ear starts the recording when the ear is lifted. The sounds are played back when the user pets the creature. The petting is detected with conductive fabric using Capacitive sensing library by Paul Badger. The reading from the sensor is sent to a Max MSP patch via serial communication. The sounds a generated from the Arduino data using a granular synthesis method based on Nobuyasu Sakonda’s SugarSynth. Sounds can be modulated by manipulating the creature's nipples, which are silicone-covered potentiometers.

8. Cucumber Weasel is a modified version of the motorised toy know as weasel ball. The plastic ball has a weighted, rotating motor inside, which makes the ball roll and change directions. The toy usually has a furry “weasel” attached to it, but here it is replaced with a silicone cast of a cucumber.

References:
Aragón, O. R; Clark, M. S.; Dyer, R. L. & Bargh, J. A. (2015). “Dimorphous Expressions of Positive Emotion: Displays of Both Care and Aggression in Response to Cute Stimuli”. Psychological Science 26(3) pp. 259–273.
Badger, P. (2008). Capacitive sensing library.
Eckel, T. (2017). New Ping library for ultrasonic sensor.
Freud, S. (1919). The ‘Uncanny’. The Standard Edition of the Complete Psychological Works of Sigmund Freud, Volume XVII (1917-1919): An Infantile Neurosis and Other Works, pp. 217-256.
Haraway, D. (1991). "A Cyborg Manifesto: Science, Technology, and Socialist-Feminism in the Late Twentieth Century," in Simians, Cyborgs and Women: The Reinvention of Nature. New York, NY: Routledge.
Haraway, D. (2003). The Companion Species Manifesto: Dogs, People, and Significant Otherness. Chicago, IL: Prickly Paradigm Press.
Lorenz, K. (1943). “Die angeborenen Formen moeglicher Erfahrung”. Z Tierpsychol., 5, pp. 235–409.
Mori, M. (2012). "The Uncanny Valley". IEEE Robotics & Automation Magazine, 19(2), pp. 98–100.
Rutanen, E. (2019). Uncanny Dimple — Mapping the Cute and the Uncanny in Human-Robot Interaction.
Sakonda, N. (2011). SugarSynth.
Sunfounder (n.d.). Crawling Quadruped Robot Kit v2.0.
Stavropoulos K. M. & Alba L. A. (2018). “‘It’s so Cute I Could Crush It!’: Understanding Neural Mechanisms of Cute Aggression”. Frontiers in Behavioral Neuroscience, 12, pp. 300
0 notes
Last Seen Blogs


ms-ogenergy
K. Jamáe


ectoskeletons
You Shoulda Never Called Me A Fat Ass Kelly Price

itblackgirlsstuff
This house serves Richonne