#Inertial sensors
Text
Inertial Sensor for Land Defense Systems Market Opportunities, and Regional Forecast To 2030

The latest “ Inertial Sensor for Land Defense Systems Market Forecast | Share and Size - 2030” report by The Insight Partners offers a detailed analysis of prime factors that impact the market growth such as key market players, current market developments, and pivotal trends. The report includes an in-depth study of key determinants of the global market including drivers, challenges, restraints, and upcoming opportunities.
This market report is ideal for businesses opting to enter or excel in the Inertial Sensor for Land Defense Systems market. This strategic market forecast not only makes businesses aware of present market scenarios but also presents future market forecasts. These insights profoundly cover Inertial Sensor for Land Defense Systems market size, share, growth, and projected revenue in the forecast duration.
The Inertial Sensor for Land Defense Systems market report encompasses driving factors of the market coupled with prime obstacles and restraining factors that hamper the Inertial Sensor for Land Defense Systems market growth. The report helps existing manufacturers and entry-level companies devise strategies to battle challenges and leverage lucrative opportunities to gain a foothold in the global market.
How is the Inertial Sensor for Land Defense Systems Market Report Beneficial for Your Business?
Figure out the Inertial Sensor for Land Defense Systems market dynamics altogether | 2030
Inspect and scrutinize the competitive scenario and the future Inertial Sensor for Land Defense Systems market landscape with the help of different strictures including Porter's five forces.
Understand the impact of different government regulations throughout the global Inertial Sensor for Land Defense Systems market and evaluate the market condition in the tough time.
Consider the portfolios of the protruding players functional in the market in consort with the thorough study of their products/services.
Have a compact idea of the highest revenue-generating segment with the help of a thorough Inertial Sensor for Land Defense Systems market analysis by our seasoned research experts.
A cost-effective way to gain valuable insights into the Inertial Sensor for Land Defense Systems market without the need to host an independent team of researchers at their own cost.
Inertial Sensor for Land Defense Systems Market diagrams, pie charts, regional market share maps, inventory network examination, and import/trade subtleties help you pitch investors.
The Inertial Sensor for Land Defense Systems market report offers an in-depth analysis of the various prime market players that are active in the market. Moreover, it provides their thorough financial analysis, business strategies, SWOT profile, business overview, and recently launched products & services. In addition, the report offers recent market developments such as market expansion, mergers & acquisitions, and partnerships & collaborations. The prime market players observed in the report are Companies Collins Aerospace, Advanced Navigation Pty Ltd, Honeywell International Inc, Aeron Systems Pvt Ltd, Northrop Grumman Corp, SBG Systems SAS, Thales SA, Emcore Corp, GEM Elettronica SRL, Exail SASOn the Basis of Technology this market is categorized further into-
FOG
MEMS
and Others
On the Basis of Application this market is categorized further into-
Stabilization Missile Systems
Stabilization Turret-Cannon Systems
Land Navigation Including Land Survey
Missile GGM-SSM
Stabilization Active Protection System
Stabilization of Optronics System
a
The report offers an in-depth study of every segment, which helps market players and stakeholders understand the fastest-growing segments with maximum Inertial Sensor for Land Defense Systems market share and highest-grossing segments in the market.
The Inertial Sensor for Land Defense Systems market is analyzed across the globe and highlights several factors that affect the performance of the market across the key regions –
North America (U.S., Canada, Mexico)
Europe (U.K., France, Germany, Spain, Italy, Central & Eastern Europe, CIS)
Asia Pacific (China, Japan, South Korea, ASEAN, India, Rest of Asia Pacific)
Latin America (Brazil, Rest of Latin America)
The Middle East and Africa (Turkey, GCC, Rest of the Middle East and Africa)
Rest of the World
The Inertial Sensor for Land Defense Systems market research offers revenue forecasts for every year coupled with sales growth of the market. The forecasts are provided by skilled analysts and after an in-depth analysis of the Inertial Sensor for Land Defense Systems market trends. These forecasts are essential for gaining investment insights into the prospects of any industry.
About Us:
The Insight Partners is a one-stop industry research provider of actionable intelligence. We help our clients in getting solutions to their research requirements through our syndicated and consulting research services. We specialize in industries such as Semiconductor and Electronics, Aerospace and Defense, Automotive and Transportation, Biotechnology, Healthcare IT, Manufacturing and Construction, Medical Devices, Technology, Media and Telecommunications, Chemicals and Materials.
#Inertial Sensor for Land Defense Systems Market#Inertial Sensor for Land Defense Systems Market Size#Inertial Sensor for Land Defense Systems Market Share#Inertial Sensor for Land Defense Systems Market Forecast
0 notes
Text
youtube
Panasonic's 6-in-1 Inertial Sensor
https://www.futureelectronics.com/m/panasonic. Panasonic, introduces the new 6in1 Inertial Sensor offering 6DoF (Degrees of Freedom) providing high sensing accuracy and much more system design flexibility. This new specialty Sensor meets the ISO26262 Function Safety Standard for automotive applications and features a unique sensing element. https://youtu.be/OY9m9I0NxPI
#Panasonic 6-in-1 Inertial Sensor#6-in-1 Inertial Sensor#Panasonic#Panasonic Sensor#Panasonic 6in1 Inertial Sensor#Sensor#6in1 Inertial Sensor#6DoF#6 Degrees of Freedom#Panasonic EWTS5GND21#EWTS5GND21#ISO26262#Youtube
1 note
·
View note
Text
youtube
Panasonic's 6-in-1 Inertial Sensor
https://www.futureelectronics.com/m/panasonic. Panasonic, introduces the new 6in1 Inertial Sensor offering 6DoF (Degrees of Freedom) providing high sensing accuracy and much more system design flexibility. This new specialty Sensor meets the ISO26262 Function Safety Standard for automotive applications and features a unique sensing element. https://youtu.be/OY9m9I0NxPI
#Panasonic 6-in-1 Inertial Sensor#6-in-1 Inertial Sensor#Panasonic#Panasonic Sensor#Panasonic 6in1 Inertial Sensor#Sensor#6in1 Inertial Sensor#6DoF#6 Degrees of Freedom#Panasonic EWTS5GND21#EWTS5GND21#ISO26262#Youtube
0 notes
Text
Inertial Sensor Market Size Trends Growth Value Forecast to 2032 | Analog Devices Inc, ALPS ALPINE CO, Epson America
Inertial Sensor Market Size Trends Growth Value Forecast to 2032 | Analog Devices Inc, ALPS ALPINE CO, Epson America
The Inertial Sensor Market 2023-2032 report is an authentic source of insightful data for business strategists. It provides the industry overview with growth analysis and historical & futuristic cost, revenue, demand, and supply data (as applicable). The research analysts provide an elaborate description of the value chain and distribution network. This industry study provides comprehensive data…

View On WordPress
#Inertial Sensor#Inertial Sensor manufacturing companies#Inertial Sensor market#Inertial Sensor market size#Inertial Sensor market trends#Scope of Inertial Sensor industry
0 notes
Text
By Ben Coxworth
November 22, 2023
(New Atlas)
[The "robot" is named HEAP (Hydraulic Excavator for an Autonomous Purpose), and it's actually a 12-ton Menzi Muck M545 walking excavator that was modified by a team from the ETH Zurich research institute. Among the modifications were the installation of a GNSS global positioning system, a chassis-mounted IMU (inertial measurement unit), a control module, plus LiDAR sensors in its cabin and on its excavating arm.
For this latest project, HEAP began by scanning a construction site, creating a 3D map of it, then recording the locations of boulders (weighing several tonnes each) that had been dumped at the site. The robot then lifted each boulder off the ground and utilized machine vision technology to estimate its weight and center of gravity, and to record its three-dimensional shape.
An algorithm running on HEAP's control module subsequently determined the best location for each boulder, in order to build a stable 6-meter (20-ft) high, 65-meter (213-ft) long dry-stone wall. "Dry-stone" refers to a wall that is made only of stacked stones without any mortar between them.
HEAP proceeded to build such a wall, placing approximately 20 to 30 boulders per building session. According to the researchers, that's about how many would be delivered in one load, if outside rocks were being used. In fact, one of the main attributes of the experimental system is the fact that it allows locally sourced boulders or other building materials to be used, so energy doesn't have to be wasted bringing them in from other locations.
A paper on the study was recently published in the journal Science Robotics. You can see HEAP in boulder-stacking action, in the video below.]
youtube
33 notes
·
View notes
Text


The fastest airplane ever to take off from a runway is the spectacular SR-71 Blackbird. We spoke to SR-71 pilot BC Thomas about life in the most exciting seat in the world.
What was the closest they got to shooting down an SR-71?
A few miles, maybe. The last known missile launch against the SR-71 was on August 25, 1981, when Maury Rosenberg (pilot) and Ed McKim (RSO) were flying against North Korea. Maury reported that he thought the explosion was a few miles away, but judging distances 15 miles above the earth is difficult because there is nothing with which to compare. Although the SR-71 had been attacked many times, especially over Vietnam during that war, nothing ever hit an SR-71 aircraft.”
Tell me something I don’t know about the aircraft.
“Perhaps the extent of the ground training we had before our first flight and for recurring training throughout our time flying the SR-71, but that is not airplane specific. For the airplane, I will tell you what two aspects of the aircraft most surprised me.
The astro-inertial navigation system (ANS), once aligned, could automatically track 61stars from a catalog, identifying their position, and through a complicated algorithm, quickly compute the aircraft’s altitude, attitude, speed, ground track, and continually update the aircraft’s position while directly controlling the aircraft’s ground track (if engaged by the pilot) and providing automatic pointing and control of the cameras and sensors. Even at maximum speed, the ANS could provide course guidance within a quarter of one mile. Unbelievable technology before the advent of the Global Positioning System (GPS).
I knew that the faster an aircraft flies, the warmer it becomes, relative to the outside air temperature, but I was quite surprised at how hot the aircraft would be at Mach 3 and above.
Interviews that Hush-kit did with BC Thomas SR 71 pilot. This is just part of a long interview that he did. Also I watched his interviews on YouTube highly recommend. Linda Sheffield
Comment that SR 71 pilot David Peters made is interesting: I certainly agree with BC. One of the most startling things I saw was after I became an( instructional pilot) IP. we were then responsible for operating the ANS . On one of my first flights we were warping along and I noticed the course readout said we were .0000 right of course. Then it picked up another star and updated. Now the readout said we were .0000 left of course. That is how accurate it was.
@Habubrats71 via X
16 notes
·
View notes
Text




AVA (2011) by iRobot, Bedford, MA. AVA, short for ‘Avatar,’ is a semi-autonomous telepresence robot. You can instruct it to go to selected waypoints avoiding obstacles along the way, rather than having to steer it manually. The base has three omnidirectional wheels, and underglow status LEDs. Ava’s face is a clip-on pad, mounted on a head that can turn at the neck and go up and down. Sensors include a depth camera, laser rangefinders, inertial movement sensors, ultrasonics, bump sensors, and an array of microphones to pick up voice commands. The collar has touch sensors all the way round, providing a tangible way to interact with AVA. “The company wants to test Ava for remote presence applications in hospitals, allowing a doctor to remotely diagnose patients or do rounds with the robot. Seen here is Ava software engineer Clement Wong on Ava's tablet.” – iRobot's Ava: She's got the touch, by Martin LaMonica, CNET,
14 notes
·
View notes
Note
I had to go to a department seminar today for a requirement and the talk was 'Modeling, Estimation, and Control of Quadrupedal and Humanoid Robot Locomotion in Non-Inertial Environments' and it was interesting but I kept thinking 'darn, I bet gender-trash would love this' It was essentially, hey can we get a robot to walk in a straight line while on a rocking ship?' and the answer was 'lol. sorta kinda' anyhow I hope you have a nice evening :)
:0 this is really cool!! i looked up the person giving the seminar (yan gu) and found this video linked from one of the papers she coauthored:
youtube
(n.b. that i just skimmed this paper and am definitely not bothering to work through all the math, but) the key assumptions this makes are that 1) the robot can perceive or otherwise know the movement of the surface relative to itself (in the lab they use fiducials stuck to the treadmill, and hint vaguely in the paper that integrating sensor data from the ship or whatever would be plausible in a real-world deployment, which -- PERSONALLY i am much less confident about, as someone who has been socially adjacent to industry work on robot integration with elevator controllers, but whatever, it's research, i'm willing to cut them slack on that) and 2) the walking surface is planar (for the biped the surface position is determined from forward kinematics assuming the robot's feet always make full contact with the surface when it does a steppy; i read the quadruped paper much less thoroughly but given how careful they were to select a gait that always has three feet in contact with the ground i'm assuming the same condition holds).
DEFINITELY a big improvement over "let's assume the floor does not move :)" control, and i don't mean to be critical here, i think it's perfectly fair for a controls paper to leave the software integration/perception challenges up to Future Work to figure out! this is just how i personally analyze robotics research -- there's always a bunch of assumptions involved to make a robot problem tractable, some of them more realistic than others, so the most important thing i want to understand about a new research thing is what assumptions they're making. (for example, a lot of navigation research assumes no sane person would design or construct a building like the stata center...)
(also, really makes you appreciate how average humans can walk on wildly pitching ships with zero perception, just pure IMU, surface contact sensing, and proprioception/kinematics. take a moment to be grateful for your cerebellum :p)
anyway -- thanks for the pointer, i always love seeing awesome new controls-y stuff! anon, i assume you know most of this stuff already, but for followers interested in learning more about controls for leggy bois, i always recommend russ tedrake's underactuated robotics class -- he has his very well-written lecture notes and several years worth of lecture videos all available online. thanks prof tedrake i love you <3
#the trashcan speaks#6.832blogging#they fucking renumbered everything but you know what i mean#professional robot torturer
9 notes
·
View notes
Text
How to Use Data From NASA’s AROW Tweets
Follow NASA’s Orion spacecraft on its first mission around the Moon with the Artemis Real-time Orbit Website (AROW). AROW visualizes data collected by sensors on Orion and provides periodic real-time data during NASA’s Artemis I mission. AROW is available on NASA’s website and on the @NASA_Orion Twitter account.
AROW will periodically tweet a set of Orion’s state vectors — data that describes precisely where Orion is located in space and how it moves — from Orion’s official twitter account once Orion is flying on its own.
You can use the information shared in AROW Twitter updates, explained below, to create a physics model, animation, visualization, tracking app, or anything imaginable. Here are some ideas for getting started:
Use the fundamental statistics to track or graph Orion’s distance from Earth or the Moon; its total distance traveled, closest lunar approach, farthest distance from Earth, etc.
Use the applied statistics to track or graph Orion’s acceleration due to gravity at a given time, using the position of Earth and Moon or comparing Orion's trajectory to the Apollo missions.
Create an animation or visualization of the mission to scale — maybe a time-lapsed view from inside the crew module looking out the window.
Based on data, recreate the mission in a space flight simulation video game platform with realistic orbits and maneuvers.
The data shared in AROW tweets are Orion’s state vectors, defined within the Earth-centered inertial coordinate frame J2000.
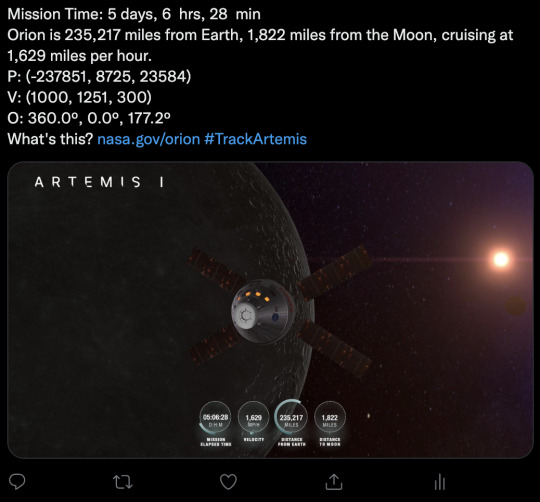
The P (position) coordinates provided represent Orion’s location on three planes:
Position (miles):
x=-237851, y=8725, z=23584
The x–y plane matches the equatorial plane of Earth.
The x-axis is permanently fixed in a direction relative to the celestial sphere, which does not rotate as Earth does.
The z-axis lies at a 90° angle to the equatorial plane and extends through the North Pole.
The y-axis is found by rotating the x-axis by 90° east around the z-axis.
To find a value for Orion’s distance from Earth, the Pythagorean theorem () can be used.
The three V (velocity) vectors represent Orion’s rate of change, corresponding with the position coordinates above:
Velocity (miles/hour):
x=1000, y=1251, z=300
As with position, the Pythagorean theorem can be used to find a value for Orion’s speed.
Also provided are O (orientation) vectors that describe the way Orion is pointing:
Orientation:
x=360.0°, y=0.0°, z=177.2°
Orion’s orientation is represented as three rotations measured in degrees around each of the axes laid out above.
Follow @NASA_Orion on Twitter for AROW mission updates during Artemis I, the first integrated test of the Orion spacecraft, Space Launch System (SLS) rocket and the ground systems at Kennedy Space Center in Cape Canaveral, Florida. Through Artemis missions, NASA will land the first woman and the first person of color on the surface of the Moon, paving the way for a long-term lunar presence and serving as a steppingstone on the way to Mars.
Find more information about state vectors at:
https://www.nasa.gov/pdf/466741main_AP_ST_Calc_ShuttleGNC.pdf
Track Orion during Artemis I at:
https://www.nasa.gov/specials/trackartemis/
45 notes
·
View notes
Text
WiP Bit: Borrowed Time
The klaxons are deafening, the lights go out and then kick back on when backup power engages. Pyrondi yells at them to stay down. Gravitics, life support, and inertial dampening are barely functional. They're going somewhere fast, and they belt into crash couches as Hammerly organizes damage control and Pyrondi takes a party into the emergency access going up to the bridge.
Long minutes later, she comms that the way is blocked with wreckage. They're going to try the turbolift tubes. Everyone in auxiliary command looked at one another and took deep breaths.
"My ship." Faro's voice was like the voice of heaven. "Commander Hammerly, report."
"We are at least fifteen percent vented to space, internal sensors are down in twenty-one percent of the ship. Medical has casualty numbers updating every five minutes. Fire control is too busy to answer as are SAR personnel. In his last act as an Imperial officer, Captain Arenault in Engineering cut the drives and sequestered the Clouzon in the backups. Senior Lieutenant Xoxtin closed off the hangers and shut the blast doors - she is presumed dead in the subsequent depressurization, fuel explosions, and fire."
"Pyrondi reporting. We have a fire on the level below the command deck. We manually triggered fire suppression and will proceed when safe. We're taking anti-grav sleds with medical supplies, coldsleep pods, and medbeds."
"Sensor report for main command?" Faro asked.
"Offline," was Hammerly's terse reply.
All hell broke loose on Pyro's comm channel and the rest of them could only listen. The blast doors to the main bridge wouldn't open if there was vacuum on the other side of it, but from the sound of it the Purgill were still there.
Hammerly shouted, "DECELERATING. ALL HANDS BRACE-"
Faro dropped to the floor, the Chimaera shaken like a toy in the hands of a child. Hammerly held on for her life. If they'd boarded that shuttle for Coruscant, they would have been crushed like an empty can. In her career, she'd been hip-to-hip with death many times and nobody joined this party believing they'd get to walk home.
Now?
Eternity whispered to her, its fingers brushing her cheek as it gathered the lives of the Seventh.
"We've got him! Thrawn's alive-"
For now. They were all alive, albeit on borrowed time.
Alive for now.
10 notes
·
View notes
Text
In the early sixties there was this super secret conference on whether or not inertial navigation (a sensor-based, self-contained navigation system) was possible, and this one team designed a fully-functioning inertial navigation system and used it to fly a plane from MIT to the conference in California, where they spent the whole night working on a presentation, which was going to be the first of the conference.
Like, can you imagine? Going to a top-secret conference on this theoretical technology and the first speaker is like, “yeah it works actually, the plane flew itself here, any questions?”
#what would you do? just go home?#can you imagine going to - I don't know - the Free Safe Cheap Cold Fusion Maybe Someday? conference#and the keynote speaker is like 'yeah I built the Free Safe Cheap Cold Fusion generator last night we're running the heat off of it actualy'#tam.txt#this is from a book on Apollo I'm listening to but I'm linking a JSTOR article as the source#for you nerds out there#science#space history
5 notes
·
View notes
Text
The Hounds of Hell
The bridge of the Vellouwyn lurched as an energy discharge off the port side collapsed a pocket of subspace into a temporary antimatter void. The implosion wasn’t close enough to significantly damage the ship, but shields and ablative plating had taken a beating during their encounters over the past week, and the ship’s energy systems were having a hard time reconciling inertial dampeners to compensate as well as they could at full capacity. Durok sneered, knowing that the attack had been intentionally off the mark, and that while they were being hounded by their pursuers, they were also being toyed with, effectively helpless to counter the assault.
All throughout the ship at floor level, vents periodically gawped open as sensors tripped their mechanisms, and stray equipment and debris from structural damage was captured by the stow-ways, dragged out of the way by R4T units hiding in their conduits to police potentially harmful stray detritus. Around him on the bridge, various crew members had donned their station restraints, giving some stability and a moderate impression of safety as the ship jostled them around, and the captain worried for them all the same; others, unable to constrain themselves to a single operational area, were unbelted and reliant on their ‘sea legs’ to keep them from careening into consoles or other equipment as they went about their work.
“Bonn! Give me a damage report update. Lieutenant Simyarn, I could really use an effective evasive pattern if you’ve come up with anything fancy, something special, perhaps away from the anti-matter weapons?” Nearby at an unmanned science station, a lighting module overloaded, showering the area in distracting, but harmless sparks. Not for the first time, Durok lamented that the Federation’s lighting modules all reacted that way to fluctuations in power systems, at an exchange for effectively cost-free lumens, as the devices were efficient enough to be powered and controlled passively without requiring connection to energy systems of any sort, cultivating their charge from ambient energy sources. Unfortunately, those sources tended to be nearby ships systems which were connected to the grid, and tactical shifts in distribution and quick cycles of energy across different conduits and grids tended to trigger sensitive receptors in the equipment to overload. Three crewmen flinched or ducked at the sudden, distracting crackle of the bursting light, and Durok wondered if it were worth the exchange.
Lieutenant Raoul Simyarn’s hands flew across the Conn panel in a feverish dance, his eyes darting around the console to gather as much information as he could while he worked. The viewscreen, which he was ignoring, showed a pair of flanking vessels, much smaller than the Vellouwyn but significantly more maneuverable and dangerously over-armed, and as Durok watched, the closer of the pair launched another emerald-hued antimatter torpedo into their trajectory. Simyarn’s palm skidded along an edge of his console, and the whole ship veered alarmingly as lagging systems tried to catch up with the barrel roll that he set her spinning into. The torpedo cruised past the ship’s underbelly, and a subscreen on the viewer popped up to track it on one of the ventral sensor arrays. The missile came dangerously close to triggering in proximity, and Durok knew that if they wanted to, their pursuers could have remote detonated the device and crippled the ship. Instead, it twinkled off into the dark of space ahead of them for a distance before detonating into another hueless antimatter void which spun reactive forces into their wake, trigging more light units to overload and sending a menacing shudder throughout the vessel.
Junior Lieutenant Hubert Bonn grabbed the back of the captain’s chair as he lurched across the deck, thrusting a Padd with the most recent systems updates into Durok’s hands. The Tellarite looked queasy and unimpressed by their circumstances, and glared at the ships on the viewscreen. “Shields are holding at 74 percent, for now, up from the mid forties last time they pinned us down, but not quite the nineties I had them to this morning. This back and forth is overloading our emitters, and the crystal projectors won’t take the strain of it without maintenance much longer: we’ll start losing peak performance and it will slide from there. Ablative shielding is good in some places, seized in others, and gone at key points. We won’t be able to recover those without spacedock, so either way we need to report in after this. Phasers are good, but targeting is off: something they’ve got keeps us from getting a solid lock, so they are better used as sweeps, and it’s not particularly helpful if we’re not committed to the act and VERY lucky. Our rail guns are still offline because their disruptors overwhelmed their magnetic control systems, and our photon torpedoes and manual warheads will still work, if we can hit someone with them. We might be better off dropping them as dark mines, but that’s a last resort, as you know, since it’s bloody illegal.”
Durok growled. The enemy had been dogged in their pursuit of the Vellouwyn for days now, appearing and disappearing at seemingly random whims, pushing the ship off course at every encounter and herding her toward unknown goals. At their second encounter they’d decided to fight back, and while the ship’s weapons had proven capable of disabling, or at least severely deterring their pursuit, the next encounter had had more ships to worry at their heels, and the attacks began to come with more frequency. Repair crews had been unable to make meaningful work of addressing the ship’s systems, as their disruptors carried feedback signals which wreaked havoc with ships systems even as the shields dispersed them, making it dangerous to work on live grids while they were under attack. Worse still, several ship’s systems were under quarantine, as the same effect had a contagious impact on the Vellouwyn’s bio-porous network, and they had been forced to slough off several clonal nodes of insulation generation membranes, and sequester others deeper within the hull where they were less likely to suffer colony destabilization.
Bonn continued to list systems of note, cycling through the tactical, into the life support and operational management systems, stopping for a colourful epithet about the inertial dampeners as Simyarn veered to avoid another attack, and then down into the power and propulsion sets. Thorough and comprehensive while being very concise, Durok was quickly up to speed with the ship’s status, and appreciated his officer’s effectiveness in crisis. The outlook was poor, but the situation wasn’t yet over with. At the end of the report, Durok thumbed the Padd in confirmation and sent Bonn back to his stations. Jamming a black-nailed thumb on the communications panel he had queued up on his armrest, Durok barked out to one side: “Petty Officer Roundhouse, have you got a course for us? We may only have one shot at this idea of yours, we need to make it count.”
Several decks away in a lab behind the deflector and sensor arrays on the belly of the Vellouwyn, a Tiburonian crewman was busily manipulating a holographic model of their current sector of space by hand. Her brow was knit in concentration, making the severe swoop of her eyebrows into her hairline more profound. In real time, tactical data feeds to her station plotted the position of two of their pursuers, the last known trajectories of the other ships which had dogged them recently where they did not match the ship signatures of those who were currently engaged, and a number of other astronomically interesting objects in the region as reference points. A Barzan ensign, Tendan Omar, worked nearby, helping to keep the link between her simulation and the various feeder systems running at peak efficiency, while a striking Kiley, Pratt Denning, was working out formulas for a chain reaction. As Durok’s voice coughed out over a hidden speaker, she frowned and kept working. “Nearly, captain. It will work. It has to. Just be ready to vent our charged warp plasma as we skim the gas giant.”
Back on the bridge, Durok nodded, knowing the motion would not translate through the coms, and tapped the signal closed with a confirmation chime. Leveraging himself out of his chair, leaving the restraint to snake back into its concealment, he strode toward the forward operations console, bracing himself on the back of his flight controller’s seat, careful not to jostle Simyarn as he focused on flying. Tapping Junior Lieutenant Sim Wu on the shoulder encouragingly, he leaned in to review the outputs of the particle systems specialist’s weapon console, nodding at the tracing algorithms he had running on the sensor readouts. The man was smart when it came to event driven programming and had produced a spectral review of their previous engagements that was currently tracking a small spike chain in energy signatures before one of the alien ships fired an antimatter weapon. “If you see your shot, take it Mister Wu.”
The Human man nodded, and Durok looked up at the viewscreen. “Sato, Jendunn, get these bastards back up on my viewscreen. I need to see if I can’t buy us some time.” Behind him at the communications station on the upper bridge, an Aenar woman’s antennae swerved slightly, while the Trillish Human beside her cast a disapproving look of acknowledgement at the back of his head, over his partner Ensign’s shoulder. The two of them had been working at parsing the sparse communication they’d received from the enemy in the past week, or intercepted in subspace traffic, and were still trying to work out if the language was based more on a computational sequence or some biological derivative. Neither of them had made as much progress as they’d have liked, but the material was sparse, and contact more aggressive than communicative. The Sato Ear for Language was legendary in Star Fleet, literally, but the attackers barely used anything that might resemble it.
A long set of moments after his order, the viewscreen changed again; the ships previously on display collapsed into a corner, where the ventral sensor overlay had appeared for the passing torpedo, and the rest was filled with an aggressive, stark, metallic figure. Repeated analysis had told them these were not Breen; study of their language told them that, despite its sound, it was not Breen language, study of their ships and tactics, while aggressive like their Alpha Quadrant comparison, suggested they were not, in fact, Breen. The thing on screen, however, looked Breen, and had the same strange droning buzz when it vocalized, setting Durok’s hair on end. It looked Breen, with the visor hued in green, although the colour and configuration of the armour was slightly different, it was very close to Breen. Durok ran his tongue over his teeth and considered his play.
“We are of Star Fleet, from the United Federation of Planets. Likely you do not know of us yet,” he began, skipping all the pleasantries. “We tried speaking with you before, as it is the way of our coalition to entreat peacefully with new met civilizations. When that failed, we defended ourselves, and rather than engage with us, you escalated.” Still receiving no response from the unemotive entity on screen, he went on. “You have plagued us for a week, and we tire of patience. You may think you have us figured out, and that you can run us down for the kill, but I assure you that is not the case. I will give you one more warning: our ship is on a mission of peace, but our kind value our lives more than we value yours. Tell us what you want and we will consider your request. Otherwise, be on your way, or face the consequences.”
For a long moment there was nothing, and then there was a blast of garbled audio signal which made several of his crew wince before the audio filters kicked in, and dimmed the noise. Behind him, Sato’s eyes went wide, and he started tapping a new set of instructions into the computer, and the chaotic static sound played again, twice more in the background on the bridge. Durok turned around to face the communications station, and Jendunn passed her hands blindly, accurately over controls to help Sato with his effort, the two muttering back and forth for a moment, before suddenly the signal was split into a half dozen audible threads overlaying the background garble of data. A deeply artificial, almost metallic synthesized voice translated several languages simultaneously into one common message: “Run. Hide. Flee. Prey.”
Durok turned around, snarling defiantly, as the figure on screen began to convulse with a new message, which the captain did not need to have translated to know for laughter. Its face disappeared from the screen, and Wu sat up at attention as the two pursuing ships returned to take up the larger viewscreen. A moment later and with a flurry of commands, a fan of lower energy phaser spread burst from the aft canons in a colourful array, and a fraction of a moment later a green hued torpedo belched from a seamless port on the lead ship’s forward hull. As it crossed the thin phaser threshold, breaking a number of the feeble streams, Wu swiped his hands across the controls and the computer recalculated the trajectory based on emitter feedback. Suddenly the streams all converged on the antimatter weapon, linking together into a bright red point which breached the device’s hull and detonated it practically within the launch tube of the pursuing ship.
The result was instantaneously catastrophic for the alien vessel, and the implosion encompassed the entire vessel in a cascade reaction, sucking the normal matter in and annihilating it to produce a pulsar-esque compressed particle stream, ripping the vessel through an event horizon and rendering it into oblivion, before the reactive shockwave blew its remaining mass into a devastating cloud of shrapnel. The second vessel was flying close enough to get caught up in the explosion, and while it was not outright destroyed, it was disabled enough to knock it out of warp, leaving it behind on long distance sensors. A number of bridge crew cheered, save Wu, who was busily harvesting additional tactical data from the successful ploy, but most knew it was, if anything, a temporary reprieve.
“Excellent technique, Mister Wu.” Durok said, patting him on the shoulder again before returning to his chair. “Raoul, get us back on the course from Astrometrics. They’ll send more dogs to hound us before we make good on any escape, so the plan still stands. We have to reach that nebula, and the system on its edge is the perfect place to try their plan. Bonn, update the repair crews on their priorities, and take only who you need: they won’t get to finish the work in all likelihood, and the crew need rest. Take volunteers after you pick the essentials, but don’t ‘motivate’ them. Work with Chief Engineer Vantel, and check in with Shurel to see if the weapon is ready.”
The Tellarite nodded and set to his work, while Chief Conn Officer Simyarn set about coordinating course updates with the astrometrics lab. Durok decided to leave the language team to pore over their new epiphanies: he’d be briefed on their findings when they were ready, and instead stood to move to the aft turbolift corridor. “Durok to Ve Sudan;” he said, waiting for the computer to acknowledge his hail. “If you’re able, come take command of the bridge. Else send Adonnas. I’m going to check on Paine.” He commanded, knowing that the second and third shift bridge officers would be relatively fresh compared to the fourth rotation, which had retired barely two hours before, mid-battle. Some of their shift’s rotations were still on station, and he knew that, were Paine Thomas at her post, they’d have been mandatorily rotated by now, but Sudan could handle that just as well: the Betazoid Lieutenant Commander had a keen sense for fatigue among the crew, and knew when they were reaching, rather than riding, their limits. He got a simple ‘Affirmative’ from her, and stepped off the bridge with a last look at the ant hill of its crew compliment, smiling with concern before turning left to his preferred turbolift station, which had been prioritized for command needs in a crisis.
“Sick bay ICU,” he instructed as he stepped into the dimly lit can, feeling the throb of fatigue budding behind his eyes as he braced for what he always considered to be an awkward period of contemplation as the lift shuttled through maglev tunnels between bulkheads. He dreaded what he’d find when he arrived at his destination: Paine was his first officer, and in the year that they’d served together thus far, he’d come to respect and rely on her. She was as true and stalwart a warrior as he had ever encountered, at any time, anywhere, so to see her laid low by the disruptor infection which had impacted the crew stationed in the aft deuterium storage bays when the first attack had taken them unprepared was a demoralizing sensation. Many of the others had been treated and were recovering, as the Vellouwyn’s medical team was among the most brilliant he’d ever seen, but three of his crew were still unconscious and in various states of suffering, with Paine being by far the most overwhelmed.
Before he returned to his rotation, perhaps to get some rest, but more likely to revisit the plan with his strategic teams before they reached their next destination, he would spend some time at their sides, speaking quietly of what he knew of them, what was important to them, their motivation and inspirations. He did not know, and nor did Chief Medical Officer Barr, whether they could hear him or not, but he felt that if anything would motivate them to stave off death, it was the things of value found in their lives. It was the least he could do to remind them of their worth.
And now...
4 notes
·
View notes
Video
youtube
NASA’s Ingenuity Mars Helicopter Captures Video of Record Flight Imagery has come down from Mars capturing a recent flight in which the rotorcraft flew farther and faster than ever before. The Ingenuity Mars Helicopter’s black-and-white navigation camera has provided dramatic video of its record-breaking 25th flight, which took place on April 8. Covering a distance of 2,310 feet (704 meters) at a speed of 12 mph (5.5 meters per second), it was the Red Planet rotorcraft’s longest and fastest flight to date. (Ingenuity is currently preparing for its 29th flight.) “For our record-breaking flight, Ingenuity’s downward-looking navigation camera provided us with a breathtaking sense of what it would feel like gliding 33 feet above the surface of Mars at 12 miles per hour,” said Ingenuity team lead Teddy Tzanetos of NASA’s Jet Propulsion Laboratory in Southern California. The first frame of the video clip begins about one second into the flight. After reaching an altitude of 33 feet (10 meters), the helicopter heads southwest, accelerating to its maximum speed in less than three seconds. The rotorcraft first flies over a group of sand ripples then, about halfway through the video, several rock fields. Finally, relatively flat and featureless terrain appears below, providing a good landing spot. The video of the 161.3-second flight was speeded up approximately five times, reducing it to less than 35 seconds. The navigation camera has been programmed to deactivate whenever the rotorcraft is within 3 feet (1 meter) of the surface. This helps ensure any dust kicked up during takeoff and landing won’t interfere with the navigation system as it tracks features on the ground. Ingenuity’s flights are autonomous. “Pilots” at JPL plan them and send commands to the Perseverance Mars rover, which then relays those commands to the helicopter. During a flight, onboard sensors – the navigation camera, an inertial measurement unit, and a laser range finder – provide real-time data to Ingenuity’s navigation processor and main flight computer, which guide the helicopter in flight. This enables Ingenuity to react to the landscape while carrying out its commands. Mission controllers recently lost communication with Ingenuity after the helicopter entered a low-power state. Now that the rotorcraft is back in contact and getting adequate energy from its solar array to charge its six lithium-ion batteries, the team is looking forward to its next flight on Mars. More About Ingenuity The Ingenuity Mars Helicopter was built by JPL, which also manages the project for NASA Headquarters. It is supported by NASA’s Science Mission Directorate. NASA’s Ames Research Center in California’s Silicon Valley and NASA’s Langley Research Center in Hampton, Virginia, provided significant flight performance analysis and technical assistance during Ingenuity’s development. AeroVironment Inc., Qualcomm, and SolAero also provided design assistance and major vehicle components. Lockheed Space designed and manufactured the Mars Helicopter Delivery System.
13 notes
·
View notes
Text
Exploring the Evolution of LiDAR and Sensor Technologies
In the ever-evolving landscape of technology, LiDAR (Light Detection and Ranging) and sensor technologies have emerged as pivotal tools across various industries. From autonomous vehicles to environmental monitoring, these advancements have significantly reshaped how we perceive and interact with our surroundings. In this blog post, we delve into the intricacies of MorpheusTek's LiDAR and sensor solutions, exploring their evolution and the transformative impact they have on diverse fields.
1. Understanding LiDAR Technology:
LiDAR operates on the principle of emitting laser pulses and measuring the time it takes for them to return after bouncing off objects in the environment. This enables precise mapping of surroundings in three dimensions. MorpheusTek's cutting-edge LiDAR systems boast high resolution, extended range, and unparalleled accuracy, making them indispensable for applications ranging from topographic mapping to urban planning.
2. Advancements in Sensor Fusion:
Sensor fusion, the integration of data from multiple sensors, plays a crucial role in enhancing the capabilities of LiDAR systems. MorpheusTek leverages state-of-the-art algorithms to fuse data from LiDAR with other sensors such as cameras, GPS, and inertial measurement units (IMUs). This fusion not only improves the accuracy of environmental perception but also enables robust object detection and tracking in dynamic scenarios, crucial for autonomous navigation systems.
3. Applications Across Industries:
a. Autonomous Vehicles: Morpheus Teks LiDAR and sensor solutions are at the forefront of enabling autonomous driving technology. By providing real-time, high-fidelity data about the vehicle's surroundings, these systems empower autonomous vehicles to navigate safely and efficiently, mitigating risks and enhancing passenger safety.
b. Urban Planning and Infrastructure Development: LiDAR technology revolutionizes urban planning by facilitating precise mapping of terrain, infrastructure, and vegetation. MorpheusTek's solutions aid city planners in making informed decisions regarding infrastructure development, flood risk assessment, and environmental conservation.
c. Environmental Monitoring:
From forestry management to disaster response, LiDAR plays a pivotal role in environmental monitoring. MorpheusTek's LiDAR systems enable accurate measurement of vegetation structure, terrain elevation, and water resources, facilitating informed conservation efforts and disaster mitigation strategies.
4. Future Prospects and Innovations:
As technology continues to evolve, MorpheusTek remains committed to pushing the boundaries of LiDAR and sensor capabilities. Future innovations may include enhanced resolution, longer range, and improved adaptability to diverse environmental conditions. Moreover, advancements in artificial intelligence and machine learning are poised to further optimize data processing and interpretation, unlocking new possibilities for LiDAR applications across industries.
Conclusion:
MorpheusTek's LiDAR and sensor technologies represent the pinnacle of innovation in environmental perception and spatial mapping. With their unrivaled precision, versatility, and reliability, these solutions are driving transformative changes across industries, from autonomous mobility to environmental conservation. As we look towards the future, the potential for further advancements and applications of LiDAR technology is limitless, promising a world where our interactions with the environment are guided by unprecedented clarity and insight.
0 notes
Text

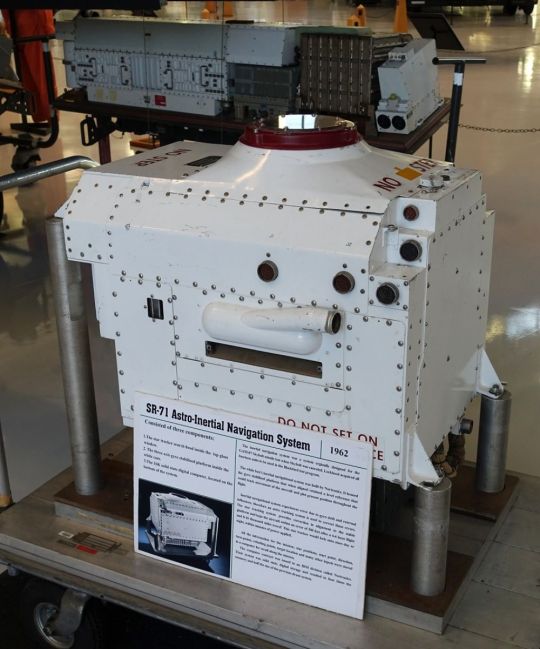
The SR-71 Blackbird Astro-Nav System (aka R2-D2) worked by tracking the stars and was so powerful that it could see the stars even in daylight
Mounted behind the SR-71 Blackbird RSO’s cockpit, this unit, (that was affectionately dubbed “R2-D2” after the Star Wars movie came out in 1977) computed navigational fixes using stars sighted through the lens in the top of the unit.
SR-71 T-Shirts

CLICK HERE to see The Aviation Geek Club contributor Linda Sheffield’s T-shirt designs! Linda has a personal relationship with the SR-71 because her father Butch Sheffield flew the Blackbird from test flight in 1965 until 1973. Butch’s Granddaughter’s Lisa Burroughs and Susan Miller are graphic designers. They designed most of the merchandise that is for sale on Threadless. A percentage of the profits go to Flight Test Museum at Edwards Air Force Base. This nonprofit charity is personal to the Sheffield family because they are raising money to house SR-71, #955. This was the first Blackbird that Butch Sheffield flew on Oct. 4, 1965.
The SR-71, unofficially known as the “Blackbird,” was a long-range, Mach 3+, strategic reconnaissance aircraft developed from the Lockheed A-12 and YF-12A aircraft.
The first flight of an SR-71 took place on Dec. 22, 1964, and the first SR-71 to enter service was delivered to the 4200th (later 9th) Strategic Reconnaissance Wing at Beale Air Force Base, Calif., in January 1966.
The Blackbird was in a different category from anything that had come before. “Everything had to be invented. Everything,” Skunk Works legendary aircraft designer Kelly Johnson recalled in an interesting article appeared on Lockheed Martin website.
Experience gained from the A-12 program convinced the US Air Force that flying the SR-71 safely required two crew members, a pilot and a Reconnaissance Systems Officer (RSO). The RSO operated with the wide array of monitoring and defensive systems installed on the airplane. This equipment included a sophisticated Electronic Counter Measures (ECM) system that could jam most acquisition and targeting radar and the Nortronics NAS-14V2 Astroinertial Navigation System (ANS).
The SR-71 Blackbird Astro-Nav System (aka R2-D2) worked by tracking the stars and was so powerful that it could see the stars even in daylight
SR-71 Astroinertial Navigation System
According to the Smithsonian Institution website, the ANS provided rapid celestial navigation fixes for the SR-71.
Mounted behind the SR-71 RSO’s cockpit, this unit (that was affectionately dubbed “R2-D2” after the Star Wars movie came out in 1977), computed navigational fixes using stars sighted through the lens in the top of the unit. These fixes were used to update the inertial navigation system and provided course guidance with an accuracy of at least 90 meters (300 feet). Some current aircraft and missile systems use improved versions as a backup to GPS.
About the ANS RSOs were known to say, “no one can jam or shoot down the sun, the moon, the planets or the stars.”
Piloting the Blackbird was an unforgiving endeavor, demanding total concentration. But pilots were giddy with their complex, adrenaline-fueled responsibilities. “At 85,000 feet and Mach 3, it was almost a religious experience,” said Air Force Colonel Jim Watkins. “Nothing had prepared me to fly that fast… My God, even now, I get goose bumps remembering.”
The SR-71 Astroinertial Navigation System, aka R2-D2, was crucial in Blackbird mission. Here’s why.
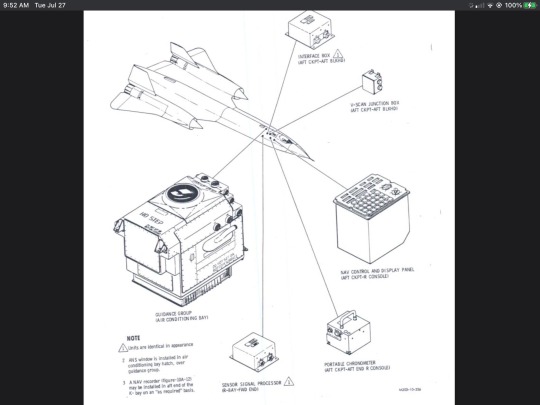
But once the SR-71 reached cruising speed and altitude, it was time to focus on the mission, which was to collect information about hostile and potentially hostile nations using cameras and sensors. The pilot’s job was to handle the aircraft and watch over the automatic systems to make sure they were doing their jobs properly. Meanwhile, the RSO handled the cameras, sensors, and the all-important ANS. The ANS was the 1960’s version of GPS, but instead of using satellites to locate itself, the ANS used the stars. This is because before the invention of the modern satnav networks there wasn’t a way to navigate the SR-71 in the areas where it operated. The SR-71 needed to be able to fix its position within 1,885 feet (575 m) and within 300 ft (91 m) of the center of its flight path while traveling at high speeds for up to ten hours in the air.
The ANS provided specific pinpoint targets located in hostile territory. It was a Gyro compass that was able to sense the rotation of the earth, while still on the runway before the SR-71 would take off. The RSO could use his coordinates of the spot ….of one place …on the runway …then read of the ANS. They were almost always exactly the same. Not always were the same stars were used on every mission, as they used the stars depending on what part of the world they were going to fly to. If flying in the southern hemisphere* they used only the stars that were seen there.

SR-71 print
This print is available in multiple sizes from AircraftProfilePrints.com – CLICK HERE TO GET YOURS. SR-71A Blackbird 61-7972 “Skunkworks”
On Jul. 2, 1967 Blackbird crew Jim Watkins and Dave Dempster flew the first international sortie in SR-71A #17972 when the ANS failed on a training mission and they accidentally flew in to Mexican airspace.
The ANS works by tracking at least two stars at a time listed in an onboard catalog, and with the aid of a chronometer, calculates a fix of the SR-71 over the ground. It was programmed before each flight and the aircraft’s primary alignment and the flight plan was recorded on a punched tape that told the aircraft where to go, when to turn, and when to turn the sensors on and off. The stars were sighted through a special quartz window (located behind the RSO cockpit) and there was a special star tracker that could see the stars even in daylight.
*It is not confirmed if the SR-71 ever flew in the southern hemisphere.
@Habubrats71 via X

15 notes
·
View notes
Last Seen Blogs




